

Un dron és una aeronau, de caràcter civil o militar, pilotada per control remot. En aquest sector de la tecnologia, en constant expansió arreu del món pels seus múltiples àmbits d’aplicació, els nanodrons són plataformes operatives amb un pes inferior als 250 g.
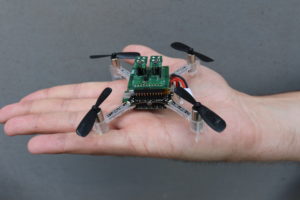
El nanodron SNAV, descrit per primer cop en un article de la revista Sensors, pesa 35 g i està dissenyat per volar i identificar gasos en diversos escenaris que no són accessibles per mitjà d’altres aparells tecnològics. Està dotat de sensors nanomètrics de gasos de tipus MOX que poden respondre a gasos com el monòxid de carboni (CO), el metà (CH4) i a altres compostos volàtils orgànics (etanol, acetona, benzè, etc.), amb un llindar de detecció dels sensors de l’ordre d’una part per milió en volum (ppmv), segons el gas i el tipus de sensor emprat.
A diferència d’altres ginys més grans, SNAV és capaç de treballar en espais interiors —pot travessar forats i esquerdes— i és operatiu en àrees de dimensions significatives —uns 160 metres quadrats—, on la font d’emissió química s’amaga en àrees poc accessibles (sostres falsos, conductes de ventilació, etc.).
SNAV: de la detecció de gasos tòxics al rescat de víctimes
Aquest nou dispositiu seria especialment indicat en operacions de rescat en edificis ensorrats per terratrèmols o explosions: «SNAV pot detectar gasos tòxics i, fins i tot, els compostos que exhalen les víctimes inconscients», destaca el professor Santiago Marco, investigador principal a l’IBEC i membre del Departament d’Enginyeria Electrònica i Biomèdica de la UB, que ha liderat la recerca. «També és adequat en la recerca de drogues o explosius en llocs no accessibles de manera directa», detalla l’expert.
En aquests escenaris després d’un terratrèmol o una explosió, els equips de rescat solen fer servir gossos —olfacció canina— especialment entrenats per trobar les víctimes. Per això, la possibilitat d’emprar robots autònoms en tasques de localització és una opció que cal considerar a curt i llarg termini.
«Fins no fa gaire, els robots terrestres centraven la recerca en l’àmbit de la localització basada en senyals químics. Avui en dia, l’opció d’emprar nanodrons amplia de manera significativa la capacitat i la rapidesa dels robots per moure’s per un espai interior i per superar obstacles com ara trams d’escales», detalla Marco, que és cap del Grup de Recerca de Processament de Senyal Intel·ligent per a Sistemes Sensors en Bioenginyeria (UB-IBEC).
Com se supera l’efecte de les turbulències i els problemes de navegació?
Les limitacions en pes i consum del nanodron i l’efecte negatiu de les turbulències dels rotors sobre els senyals dels sensors són els grans punts d’inflexió en el disseny i desenvolupament tècnic de nanodrons com l’SNAV. Per superar l’efecte negatiu de les turbulències —que afecta el procés d’obtenció de dades precises—, l’equip UB-IBEC ha aplicat tècniques de processament de senyal que ajuden a obtenir informació útil dels sensors instal·lats a l’SNAV.
Un altre punt crític és l’autolocalització del nanodron en l’escenari d’acció. En general, el mecanisme de control de drons que volen llargues distàncies en espais oberts es basa en un sistema de navegació GPS. Ara bé, aquesta no és una opció viable per a dispositius que volen en espais interiors. En el cas de l’SNAV, «el nou nanodron disposa d’acceleròmetres i giroscopis que ajuden a la navegació però sense la precisió desitjada per a la localització. Per això, aquesta funció es basa en una sèrie de sis transceptors de radiofreqüència —ubicats en posicions conegudes— i un transceptor instal·lat en el mateix dron. Aquest sistema ens permet dirigir el nanodron fins a la posició desitjada», explica l’investigador Javier Burgués (UB-IBEC), primer signant de l’estudi.
Nous algoritmes inspirats en el comportament animal
En el marc de la recerca, l’equip d’experts UB-IBEC ha estat el responsable de desenvolupar la plataforma SNAV, calibrar els sensors i comprovar-ne el funcionament, i finalment, programar els algoritmes per al processament de les dades, la comunicació i la navegació robòtica. Un cop desenvolupada la plataforma SNAV, totes les proves de navegació robòtica de l’SNAV s’han dut a terme a la Universitat d’Örebro (Suècia), en col·laboració amb els experts Víctor Hernández i Achim J. Lilienthal.
Algunes futures línies de recerca d’aquest equip investigador van dirigides a desenvolupar algoritmes de navegació bioinspirats que es basin, per exemple, en el comportament d’insectes com el mosquit o l’arna. «Una altra línia que volem abordar és la fusió de dades de múltiples sensors de gas per augmentar la selectivitat envers determinats compostos d’interès. En aquest cas, es tractaria de fer experiments en escenaris complexos i en presència d’interferències químiques», conclouen els experts Santiago Marco i Javier Burgués.



