
About
The “Synthetic Perceptive, Emotive and Cognitive Systems (SPECS)” group (http://specs-lab.com/) is a multidisciplinary research group interested in understanding the neuronal, psychological and behavioural principles underlying perception, emotion and cognition.
SPECS mission is to understand mind, brain and behaviour through constructing synthetic perceptive, emotive and cognitive systems.
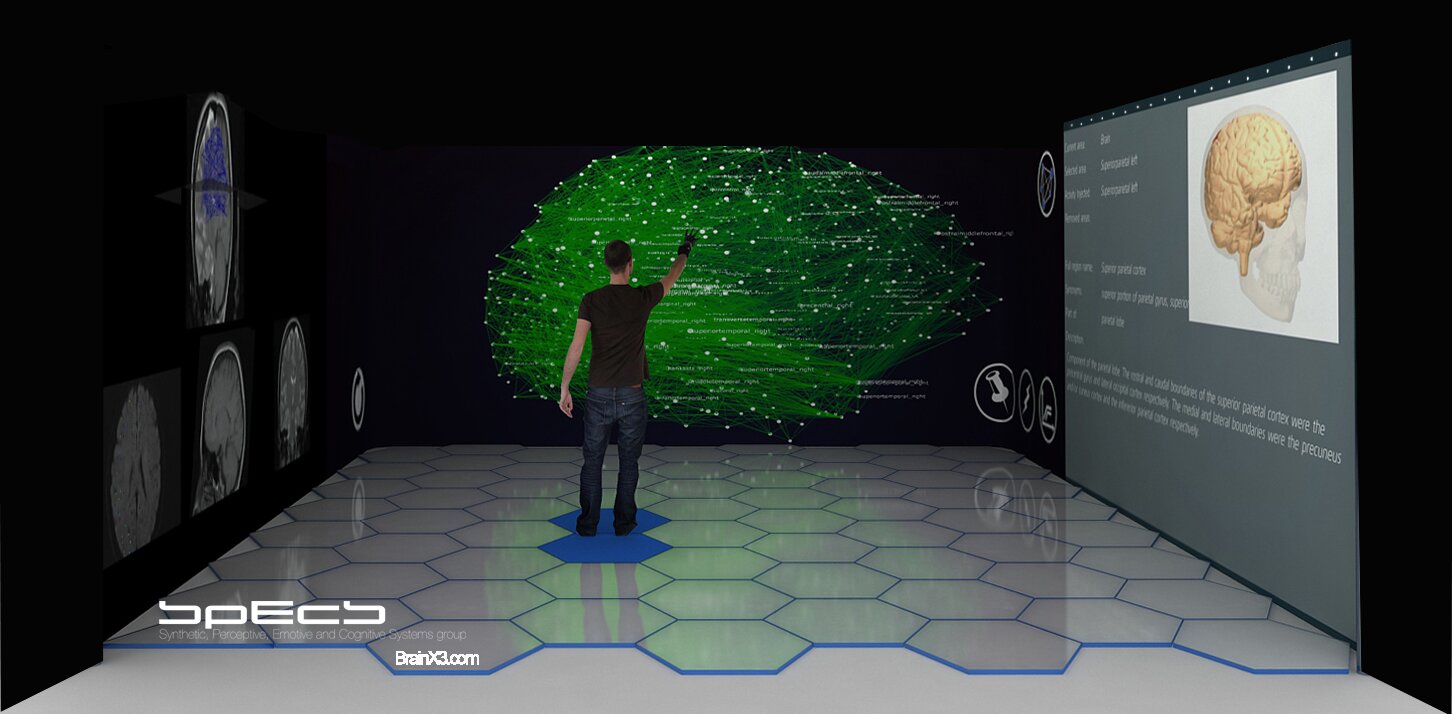
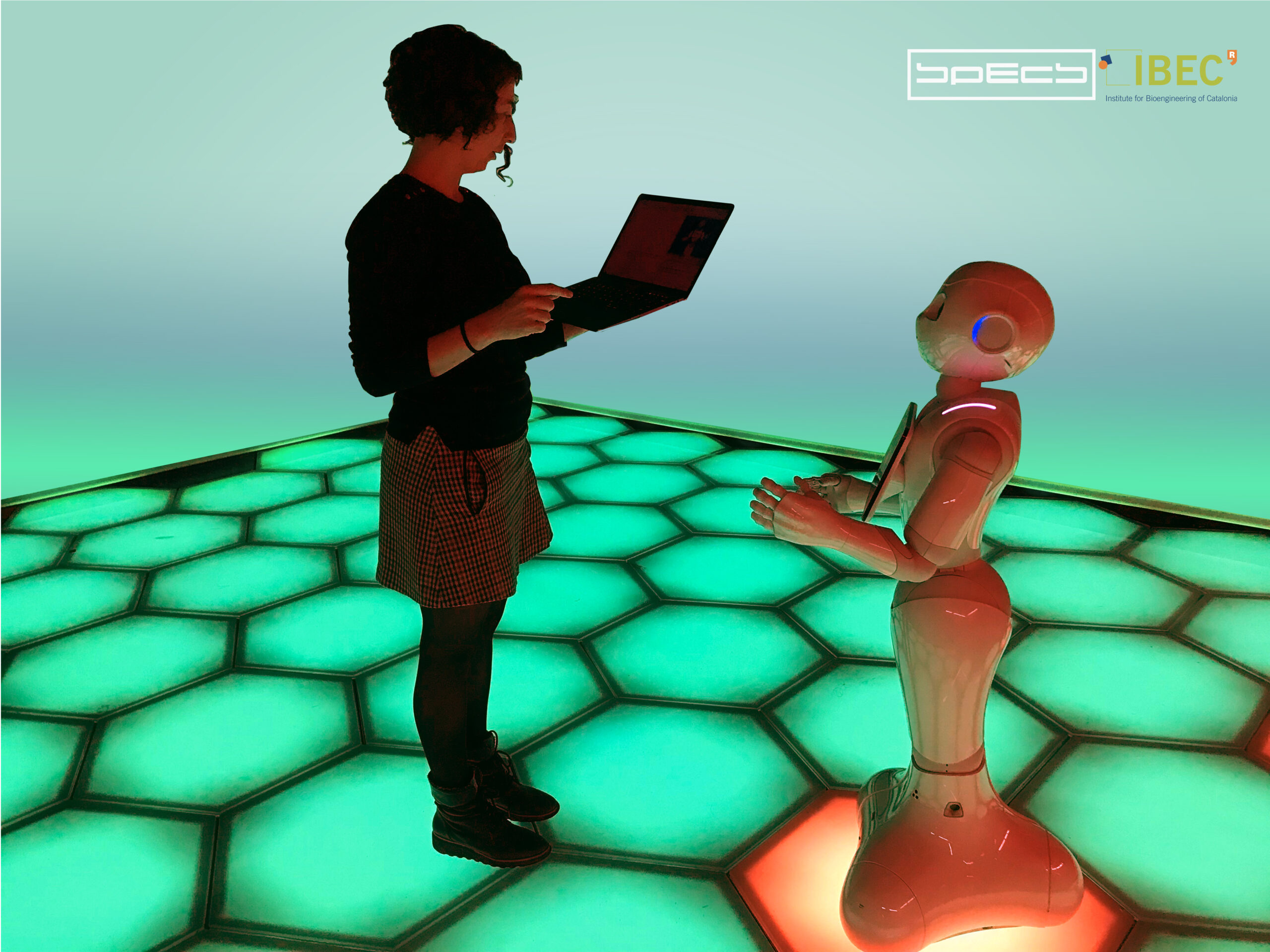
SPECS’s interdisciplinary research has a long-standing tradition in the domains of computational neuroscience, cognitive science and interactive systems with a focus on neuro-technologies, robotics and AI, combining real word systems such as large-scale interactive systems, robots and virtual reality systems to understand build and repair the brain and the body.
Following a deductive medicine, approach SPECS is investigating a range of brain pathologies where medical interventions are explicit validations of scientific predictions.
The cornerstone of SPECS’s work on the biological principles underlying perception, cognition and behaviour is provided by the Distributed Adaptive Control (DAC) architecture. The DAC architecture is built on a series of neuronal models of learning and problem solving, developed over the last 15 years and constitutes an evolving candidate theory of general intelligence and cognition. DAC has become a standard in the field of artificial intelligence and behavior based robotics. DAC can account for aspects of human cognition that are usually only addressed with top-down symbolic models.
SPECS is also involved in the following activities:
- Master program: Cognitive Systems and Interactive Media at UPF
- Summer school: Barcelona Cognition Brain and Technology
- Conference: LIVING MACHINES conference
- Summer courses: NEURO-ROBOTICS for children (BIYSC)
- Dissemination: Outreach Activities Escolab – Semana Cerebro – Festa de la Ciencia – Bojos…
Projects
| NATIONAL PROJECTS | FINANCER | PI |
|---|---|---|
| TECSAM · Xarxa d’Innovació de Noves Tecnologies en Salut Mental | AGAUR | Anna Mura |
| INTERNATIONAL PROJECTS | FINANCER | PI |
|---|---|---|
| RGS@HOME Scaling ICT based neurorehabilitation to personalized 24/7 home care (2019-2021) | EIT Health | Anna Mura |
| VirtualBrainCloud Personalized Recommendations for Neurodegenerative Disease (2018-2022) | European Comission Digital transformation in Health and Care | Anna Mura |
| HR-Recycler Hybrid Human-Robot RECYcling plant for electriCal and eLEctRonic equipment (2018-2022) | European Comission Transforming European Industry | Anna Mura |
| iNavigate Brain-inspired technologies for intelligent navigation and mobility (2019-2023) | European Comission Marie Curie | Anna Mura |
| ReHyb Rehabilitation based on Hybrid neuroprosthesis (2020-2023) | European Comission | Anna Mura |
EIT Health is supported by EIT, a body of the European Union

| FINISHED PROJECTS | FINANCER | PI |
|---|---|---|
| cRGS Cognitive Rehabilitation Gamming System (cRGS): a novel Virtual Reality-based system for the conjunctive training of stroke-derived cognitive impairments (2019-2021) | European Comission ERC – PoC | Anna Mura |
| RGS@HOME The RGS@home project: Scaling ICT based neurorehabilitation to personalized 24/7 home care (2019-2021) | EIT Health, European Institute of Technology (EIT) | Anna Mura |
| ANITA Advanced tools for fighting oNline Illegal TrAfficking (2018-2021) | European Comission Research and Innovation action | Anna Mura |
| HBP Education Activity (2020) | European Comission FET Flaships | Anna Mura |
| DAC-CHM Distributed Adaptive Control of Consciousness in Humans and Machines (2017-2020) | MINECO Retos investigación: Proyectos I+D | Anna Mura |
| socSMCs Socialising Sensori-Motor Contingencies (2017-2020) | European Comission FET Proactive | Anna Mura |
| CDAC The role of consciousness in adaptive behavior: A combined empirical, computational and robot-based approach (2014-2020) | ERC Advanced Grant | Anna Mura |
| iC-ACCESS Accessing Campscapes: Inclusive Strategies for Using European Conflicted Heritage (2016-2019) | HERA Joint Research Programme Uses of the Past, REFLECTIVE-1-2014 | Anna Mura |
| socSMCs Socialising Sensori-Motor Contingencies (2015-2018) | Future Emerging Technologies (FET), H2020 | Anna Mura |
| WYSIWYD What You Say Is What You Did (2014-2017) | FP7-ICT-2013-10, grant agreement n° 612139 | Anna Mura |
| EASEL Expressive Agents for Symbiotic Education and Learning (2013-2017) | FP7-ICT-2013-10, grant agreement n° 611971 | Anna Mura |
| CSNII Convergent Science Network of Biomimetics and Neurotechnology (2013-2016) | FP7-ICT-601167 | Anna Mura |
| INSOCO (2015-2018) | Anna Mura | |
| SANaR Smart Autonomous Neuro-Rehabilitation System | MINECO, Retos Investigación 2013 | Anna Mura |
| TECNIO (2016-2019) | Generalitat of Catalonia | Anna Mura |
Publications
(See full publication list in ORCID)