
ABOUT
We develop different Systems ranging from active nanoparticles (nanobots), 3D Bioprinted Actuators and flexible biosensors. We are interested in fundamental studies of active matter, the use of nanobots for future nanomedicine and environmental applications and the bioengineering of new devices based on hybrid systems.
NanoBio Team
The use of enzyme catalysis is emerging as an attractive alternative to power micro- and nanomachines due to their unique features including biocompatibility, versatility and fuel bioavailability. Our group has demonstrated the use of different enzymes, including urease and glucose oxidase, to generate active propulsion of nano- and microparticles, paving the way towards new applications of artificial active matter in biomedicine. We have recently demonstrated that using enzyme-powered nanomotors can enhance anti-cancer drug delivery in vitro, improve the targeting of 3D bladder cancer spheroids and sense their surrounding environment. We are also interested in understanding the fundamental aspects underlying the motion of biocatalytic microswimmers for a safe and efficient design of micro- and nanomotors.
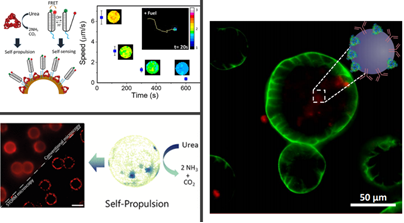
Smart micro- and nanorobots are able to swim, monitor their own activity, sense their environment and deliver drugs to 3D bladder cancer spheroids using biocompatible and bioavailable fuels such as urea.
Read more:
Ionic Species Affect the Self-Propulsion of Urease-Powered Micromotors
Xavier Arqué, Xavier Andrés, Rafael Mestre, Bernard Ciraulo, Jaime Ortega Arroyo, Romain Quidant, Tania Patiño, Samuel Sánchez
Research (2020) 2424972
Intrinsic enzymatic properties modulate the self-propulsion of micromotors
Xavier Arqué, Adrian Romero-Rivera, Ferran Feixas, Tania Patiño, Sílvia Osuna, Samuel Sánchez
Nature Communications (2019) 10, 2826
Self-sensing enzyme-powered micromotors equipped with pH responsive DNA nanoswitches
Tania Patiño, Alessandro Porchetta, Anita Jannasch, Anna Lladó, Tom Stumpp, Erik Schäffer, Francesco Ricci, Samuel Sánchez
Nano letters (2019) 19, (6), 3440-3447
Targeting 3D Bladder Cancer Spheroids with Urease-Powered Nanomotors
Ana C. Hortelão, Rafael Carrascosa, Nerea Murillo-Cremaes, Tania Patiño, Samuel Sánchez
ACS nano (2019), 13, 429-439
Fundamental Aspects of Enzyme-Powered Micro-and Nanoswimmers
Tania Patiño, Xavier Arqué, Rafael Mestre, Lucas Palacios, Samuel Sánchez
Accounts of chemical research (2018) 51, 2662-2671
Influence of enzyme quantity and distribution on the self-propulsion of non-Janus urease-powered micromotors
Tania Patiño, Natalia Feiner-Gracia, Xavier Arqué, Albert Miguel-López, Anita Jannasch, Tom Stumpp, Erik Schäffer, Lorenzo Albertazzi, Samuel Sánchez
Journal of the American Chemical Society (2018), 140, 7896-7903
Enzyme‐Powered Nanobots Enhance Anticancer Drug Delivery
AC Hortelão, T Patiño, A Perez‐Jiménez, À Blanco, S Sánchez
Advanced Functional Materials (2018), 28, 1705086
Videos:
3D BioPrinted Soft Robotics
In the research line of soft bio-hybrid robotics, we explore the integration of biological tissue and artificial materials at larger length scales. In particular, we take advantage of the 3D bioprinting technique to develop bio-robotic systems composed of skeletal muscle cells embedded in biocompatible hydrogels, which can be 3D bioprinted alongside other artificial materials. Theses materials can act as scaffolds, support, or flexible parts, as well as be responsive upon certain stimuli. By controlling the contractions of skeletal muscle cells via electric fields, we can measure the forces exerted by these bio-actuators against artificial 3D-printed posts. Using this setup, we have performed studies on the adaptability of bio-actuators after applying different training protocols and we have observed how their force generation and gene expression can adapt to the frequency of stimulation and stiffness of the artificial posts.
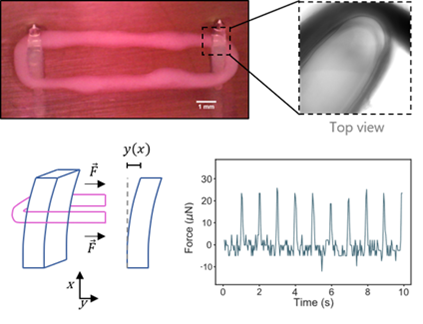
3D-bioprinted bio-actuator based on skeletal muscle used as a force measurement platform. Upon electrical stimulation, the muscle can contract, bend the post and their force can be calculated.
Read more:
3D-bioengineered model of human skeletal muscle tissue with phenotypic features of aging for drug testing purposes
Rafael Mestre, Nerea García, Tania Patiño, Maria Guix, Judith Fuentes, Mauricio Valerio-Santiago, Núria Almiñana, Samuel Sánchez
Biofabrication (2021) 13, 045011
Bio-hybrid soft robots with self-stimulating skeletons
, , , , Judith Fuentes, , Science Robotics (2021) 21, eabe7577
Design, optimization and characterization of bio-hybrid actuators based on 3D-bioprinted skeletal muscle tissue
Rafael Mestre, Tania Patiño, Maria Guix, Xavier Barceló, Samuel Sánchez
Biomimetic and Biohybrid Systems (2019) 8th International Conference, Living Machines 2019
Lecture Notes in Computer Science, Springer International Publishing (Nara, Japan) 11556, 205-215
Force Modulation and Adaptability of 3D‐Bioprinted Biological Actuators Based on Skeletal Muscle Tissue
Rafael Mestre, Tania Patiño, Xavier Barceló, Shivesh Anand, Ariadna Pérez‐Jiménez, Samuel Sánchez
Advanced Materials Technologies (2018): 1800631
Miniaturized soft bio-hybrid robotics: a step forward into healthcare applications
Tania Patino, Rafael Mestre, Samuel Sánchez
Lab Chip (2016) 1619, 3626-3630
Active matter in complex systems
We study colloidal suspensions of Pt-coated silica particles as a model system of synthetic active matter. These systems have mostly been studied in homogeneous environments until now. Our interest lies in observing these systems in more complex settings, such as near interfaces, complex media or with flow involved. Since the self-propelled particles generate chemical and hydrodynamic fields around them, they interact in complex ways with flows and nearby surfaces that often leads to interesting behaviour. We could find, for instance, that close to solid surfaces they achieve a stable ‘gliding’ state which could be exploited to develop a system for guiding micro-nano motors using topographical features as shown with our micropatterned ratchets. When flow is present, particles also behave different as they reorient perpendicular to the flow.
We recently published the collective guidance of out-of-equilibrium systems without using external field, designing an strategy to achieve directed motion without breaking detailed balance, for example by asymmetric topographical patterning. We engineer a two-dimensional periodic topographical design to spontaneous particle edge guidance and corner accumulation of self-propelled particles. This emergent behaviour is guaranteed by a second-order non-Hermitian skin effect, stablishing a fruitful bridge between active and topological matter.
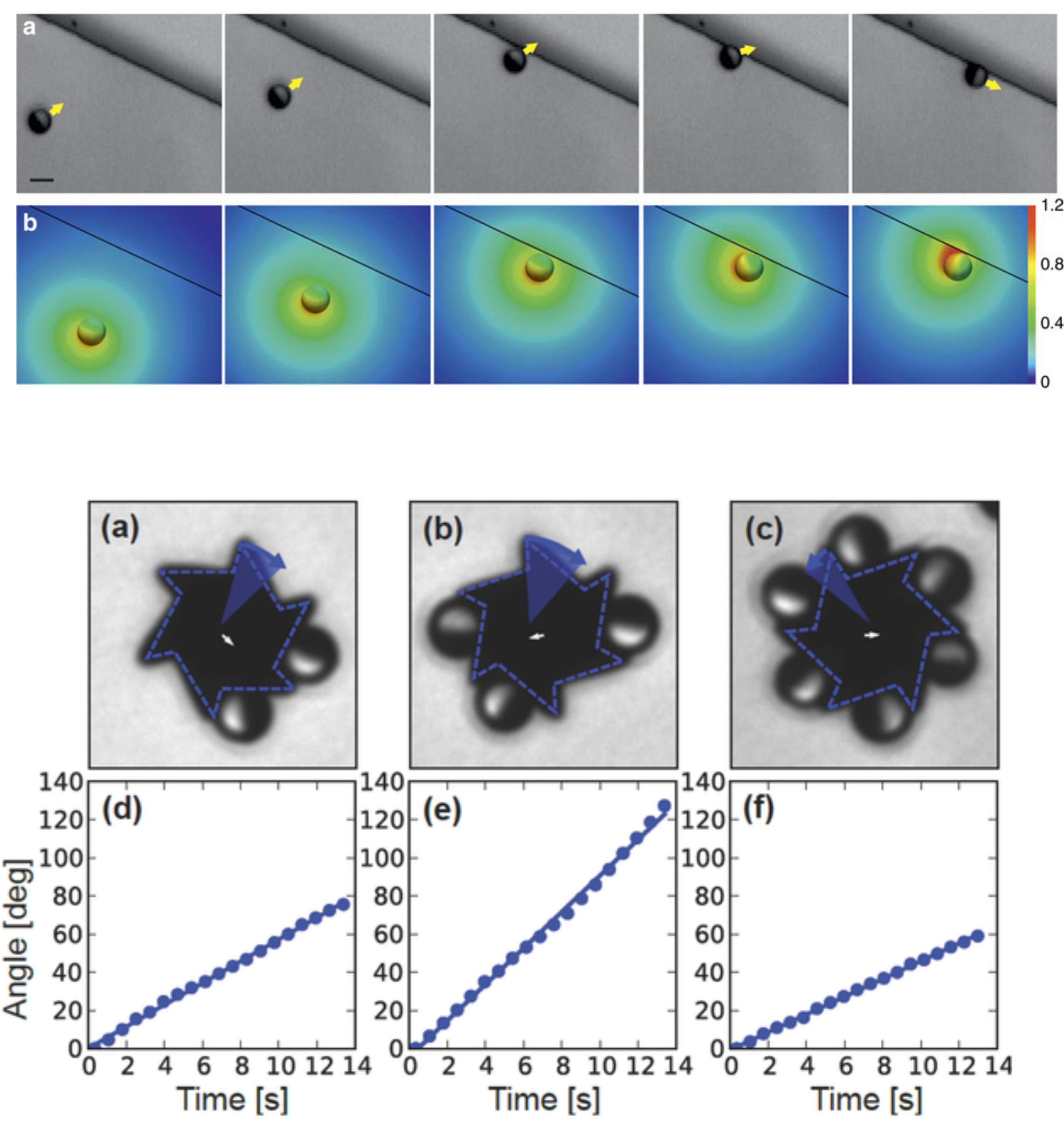
Phoretic and hydrodynamic interactions with nearby surfaces and flows can be exploited to create a guidance mechanism for self-propelled particles
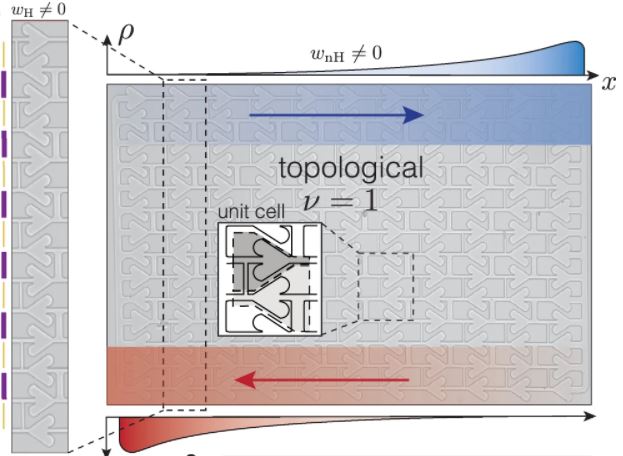
Topological device that displays chiral edge modes at the top and bottom, and which are related to a non-vanishing Hermitian topological invariant.
Read more:
Guided accumulation of active particles by topological design of a second-order skin effect
Lucas S. Palacios, Serguei Tchoumakov, Maria Guix, Ignacio Pagonabarraga, Samuel Sánchez, Adolfo G. Grushin
Nature Communications (2021) 12, 4691
Self-propulsion of active colloids via ion release: Theory and experiments
Marco De Corato, Xavier Arqué, Tania Patiño, Marino Arroyo, Samuel Sánchez, Ignacio Pagonabarraga
Physical Review Letters (2020) 124, 108001
Guidance of active particles at liquid-liquid interfaces near surfaces
Lucas Palacios, Jaideep Katuri, Ignacio Pagonabarraga and Samuel Sánchez
Soft Matter (2019) 15, 6581-6588
Directed Flow of Micromotors through Alignment Interactions with Micropatterned Ratchets
Jaideep Katuri, David Caballero, Raphael Voituriez, Josep Samitier and Samuel Sánchez
ACS Nano (2018) 12, 7282-7291
Cross-stream migration of active particles
Jaideep Katuri, William E. Uspal, Juliane Simmchen, Albert Miguel-López, Samuel Sánchez
Science Advances (2018) 4
Topographical Pathways Guide Chemical Microswimmers
Juliane Simmchen, Jaideep Katuri, William E. Uspal, Mihail N. Popescu, Mykola Tasinkevych, and Samuel Sánchez
Nature Communications (2016) 7 , 10598
Videos:
Environmental applications of micro-nano motors
Micromotors can remove a wide variety of pollutants from contaminated water.
Artificial micromotors, based on bubble self-propulsion have demonstrated to be able to mix solutions and enhance chemical reactions while they swim. These micromotors are mostly based on two main structures, tubular and spherical.
First, we have designed tubular micromotors, which use hydrogen peroxide as a fuel, using different techniques such as, ‘rolling-up’ and electrodeposition. ‘Rolling-up’ microjets with a functional iron-based layer can generate and actively transport free radicals in the solution performing the degradation of organic dyes via Fenton-like reactions in presence of hydrogen peroxide. On the other hand, electrodeposited microjets, which are smaller than their ‘roll-up’ counterparts, contain graphene-oxide on the outside working as ‘heavy metal scrubbers’. In this case, the metal is adsorbed and removed from the contaminated water. The metal can thereafter be desorbed and the microjets used again.
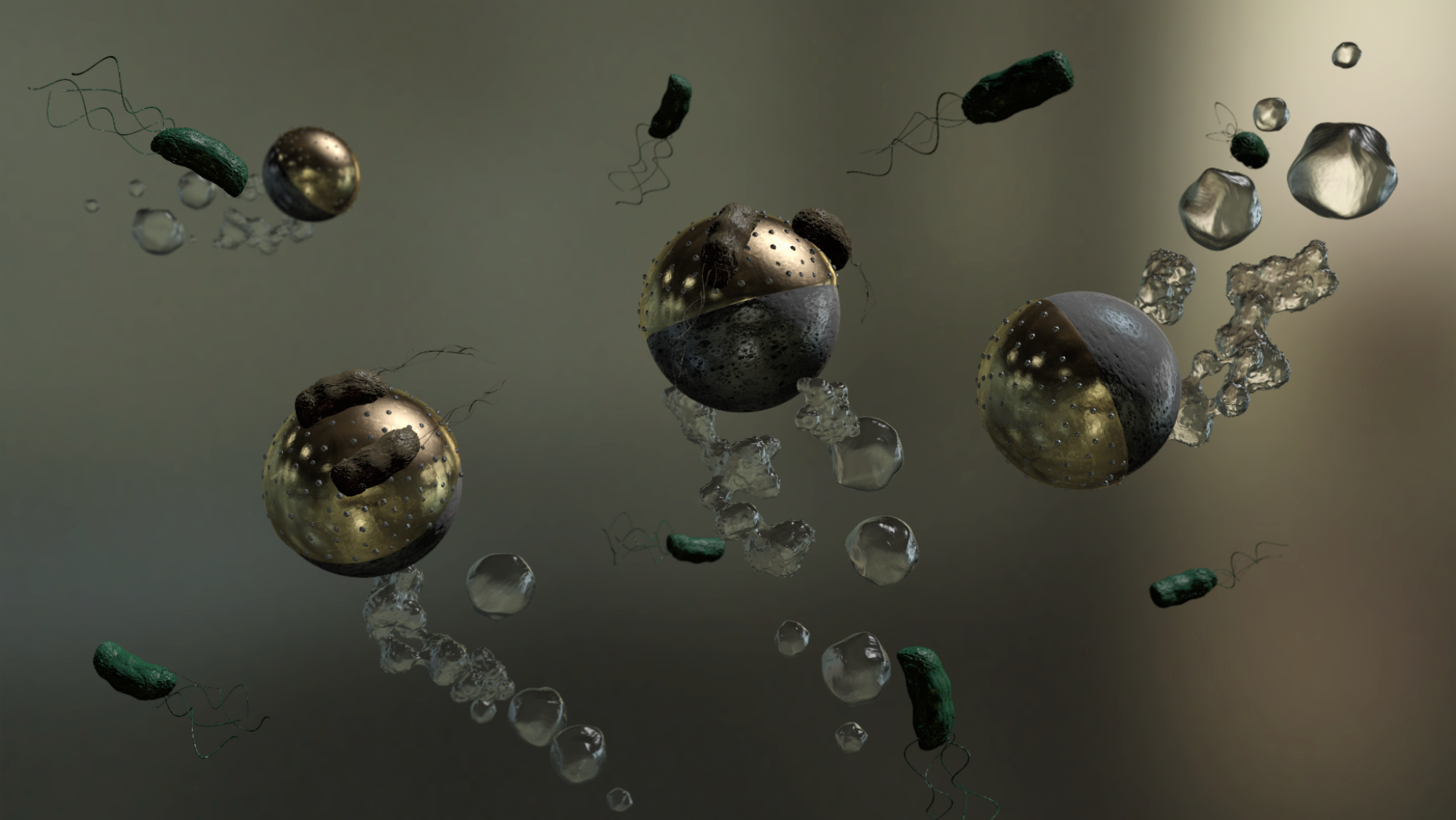
In order to target other water pollution problems, such as microorganism contamination, we have developed spherical microbots that can kill bacteria while they swim. These microbots have a Janus structure based on spherical magnesium microparticles, able to dissolve in water producing hydrogen bubbles, covered in one of their faces by Fe, Au and AgNPs which provide magnetic, bacteria attachment and bactericidal properties to the microjets.
Towards scaling-up of the micromotor synthesis for cleaning large volumes of water, we have fabricated micromotors using exclusively chemical methods such as, precipitation, reduction and sol-gel chemistry. These micromotors are based on a silica microtubular structure which contains an inner-layer of a catalytic material (PtNPs or MnO2) capable of removing pollutants efficiently from water while they swim in the presence of hydrogen peroxide. The external decoration of these structures with magnetic nanoparticles provides for good magnetic control. Finally, magnetic and catalytic micromotors formed by the aggregation of cobalt ferrite nanoparticles were synthesized to remove antibiotics from water. All these micromotors, due to their magnetic properties can be removed from the solution after finishing their targeting action by the application of an external magnetic field.
Micromotors can remove a wide variety of pollutants in contaminated water.
Read more:
Microbots Decorated with Silver Nanoparticles Kill Bacteria in Aqueous Media
Diana Vilela, Morgan M. Stanton, Jemish Parmar, and Samuel Sánchez
ACS Appl. Mater. Interfaces (2017) 9, 22093–22100
Reusable and Long-Lasting Active Microcleaners for Heterogeneous Water Remediation
Jemish Parmar, Diana Vilela, Eva Pellicer, Daniel Esqué-de los Ojos, Jordi Sort, and Samuel Sánchez
Advanced Functional Materials (2016) 26, 4152–4161
Graphene-Based Microbots for Toxic Heavy Metal Removal and Recovery from Water
Diana Vilela, Jemish Parmar, Yongfei Zeng, Yanli Zhao, and Samuel Sánchez
Nano Letters (2016) 16, 2860-2866
Videos:
(Flexible) Biosensors for non-invasive Point-of-Care diagnostics
Point-of-care diagnostics allows decentralizing clinical diagnostic practices and monitoring health out of specialized hospital settings. Advantages of such decentralization are improved quality of life of patients, enhanced therapeutic efficacy thanks to more frequent tests, and lower overall cost of the health system. We develop flexible biochemical sensors for non-invasive and cost-effective monitoring of analytes in biological fluids alternative to blood, e.g. sweat, tears, and saliva. We combine electrochemical electrochemical sensors with microfluidics and electronics to achieve fully integrated devices, that are well suited for low-cost, portable and user-friendly medical diagnostics.
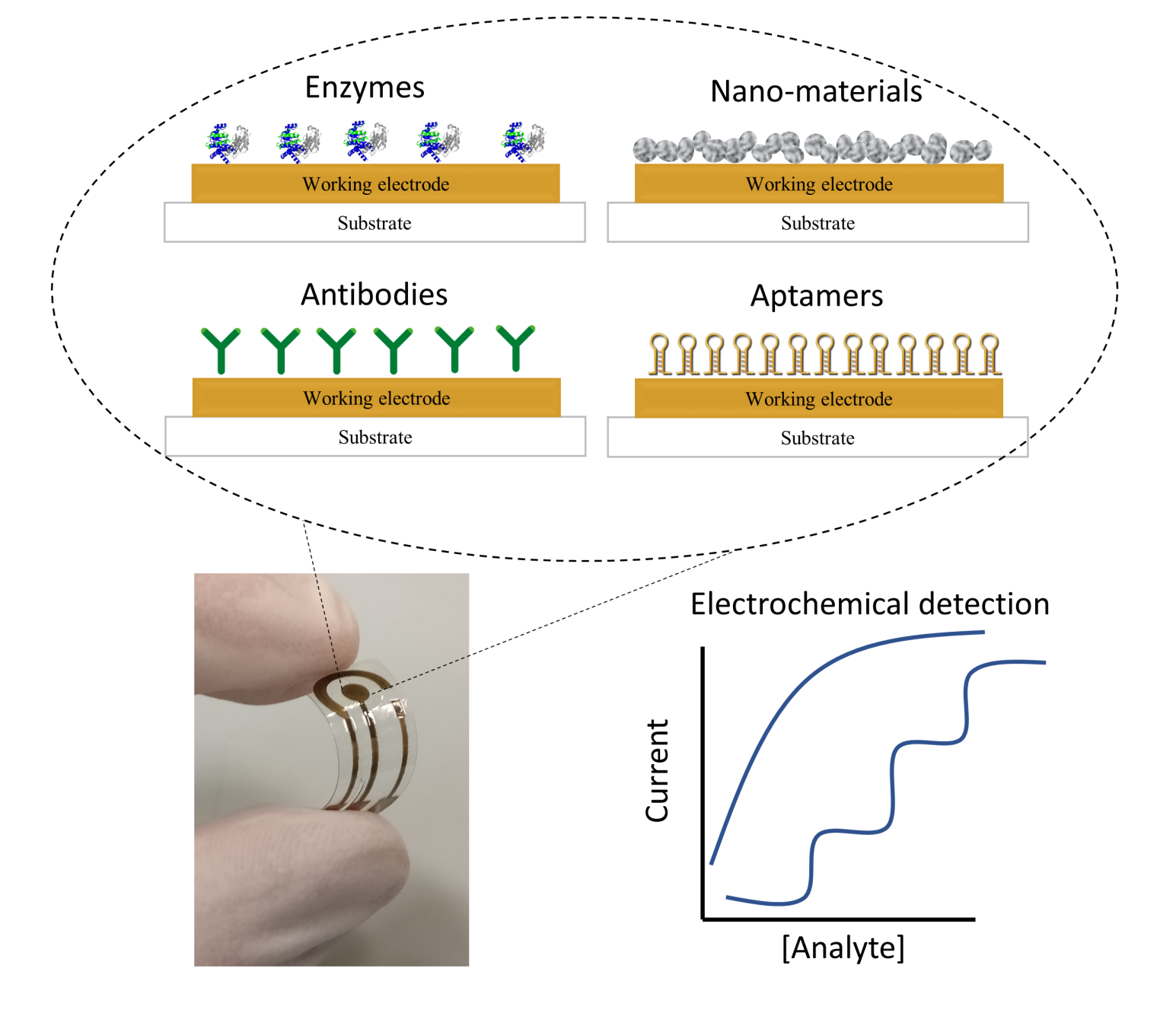
Electrodes fabricated on flexible substrates are modified with a wide range of materials for selectivity towards biomarkers. Analytes are quickly quantified by electrochemical techniques.
Read more:
Inkjet printed flexible non-enzymatic glucose sensor for tear fluid analysis
Agostino Romeo, Ana Moya, Tammy S. Leung, Gemma Gabriel, Rosa Villa and Samuel Sánchez
Applied Materials Today (2018) 10, 133-141
Smart biosensors for multiplexed and fully integrated point-of-care diagnostics
Agostino Romeo, Tammy Sue Leung, and Samuel Sánchez
Lab Chip (2016) 16, 1957-1961
Flexible sensors for biomedical technology
Diana Vilela, Agostino Romeo, and Samuel Sánchez
Lab Chip (2016) 16, 402-408
[
STAFF
Samuel Sánchez Ordóñez
 ibecbarcelona.eu
ibecbarcelona.euAlumni
- Àngel Blanco Blanes | 2015-2021 Lab technitian (IBEC)
- Dr. Morgane Valles | 2019-2021 Postdoctoral researcher (IBEC)
- Dr. Ana C. Hortelão | 2015-2021 PhD candidate and Postdoctoral researcher (IBEC)
- Ferran Blasi Moreno | 2021 TFG student (Institut Químic de Sarrià IQS, Spain)
- María Porteiro Figueiras | 2021 Master student (University of Barcelona, Spain)
- Paz Aragón Chivite | 2021 TFG student (Autonomous University of Barcelona, Spain)
- Ibtissam Ghailan Tribak | 2021 TFG student (University of Barcelona, Spain)
- Arnau Llobera Ris | 2021 TFG student (University of Barcelona, Spain)
- Chiara Greco | 2020 Master student (Politecnico di Torino, Italy)
- Giulia Zarpellon | 2018-2019 Research Assistant
- Dr. Lei Wang | 2018-2020 Postdoctoral researcher (IBEC) | Current position: Professor at Harbin Institute of Technology
- Nerea García | 2020 Master student (UB – UPC, Spain)
- Dr. Paul Soto | 2017-2019 Postdoctoral researcher (IBEC) | Current position: postdoctoral researcher at BIAM in Cadarache
- Pascal Blersch | 2019 Master student
- Xavier Andrés | 2019 Master student (University of Barcelona, Spain)
- Núria Cadefau | 2019 Master student (Université de Lyon, France)
- Joaquim Llàcer Wintle | 2019 Master student (BIST Barcelona, Spain) | Current position: PhD Candidate at ETH Zürich
- Roland Rocafort | 2019 Visiting bachelor student MIT
- Prof. Dong Pyo Kim | 2018 Visiting Researcher
- Dr. Jemish Parmar | 2015-2019 PhD candidate (IBEC)
- Dr. Jaideep Katuri | 2015-2019 PhD candidate (Max Planck for Intelligent Systems and IBEC)
- Dr. Diana Vilela | 2014-2019 Postdoctoral researcher (Max Planck for Intelligent Systems and IBEC) | Current position: Postdoctoral researcher at Universidad Complutense de Madrid
- Elisabeth Bigorra | 2018 Bachelor student (TFG, Universitat Autònoma de Barcelona)
- Dr. Agostino Romeo | 2016-2019 Postdoctoral researcher (IBEC) | Current position: Innovation Project Manager at Vall d’Hebron
- Albert Miguel-López | 2015-2018 Master student and research assistant
- Liam K. Herndon | 2018 Visiting bachelor student MIT
- Dr. Mingjun Xuan | 2018 Postdoctoral researcher
- Ander Eguskiza | 2018 Master student (University Pompeu Fabra, Spain)
- Carlos Martínez Martin | 2018 Master student (University of Barcelona, Spain)
- Rafael Carrascosa | 2018 Master student
- Xavier Barceló | 2018 Master student (University of Barcelona, Spain)
- Natàlia Salvat | 2018 Master student (University of Barcelona, Spain)
- Dr. Nerea Murillo-Cremaes | 2017-2018 Postdoctoral Researcher | Current position: Leitat Technological Center
- Ariadna Pérez-Jiménez | 2015-2018 Group technician
- Shivesh Anand | 2017 Research assistant
- Dr. Katherine Villa | 2017-2018 Postdoctoral researcher | Current position: Caixa Junior Leader Fellow at the Insitute of Chemical Research of Catalonia (ICIQ)
- Sílvia Vicente Rizo | 2017 Master student (University of Barcelona, Spain)
- Tania Gonçalves | 2016 Master student
- Dr. Morgan M. Stanton | 2015 Posdoctoral Researcher (Max Planck for Intelligent Systems)
- Dr. Xing Ma | 2015 Postdoctoral Researcher (Max Planck for Intelligent Systems) | Current position: Harbin Insitute of Technology
- Dr. Lluís Soler | 2015 Postdoctoral Researcher (Max Planck for Intelligent Systems) | Current position: Institute of Energy Technologies (INTE), UPC (ETSEIB), Barcelona
- Azaam Aziz | 2015 Master student (Fachhochschule Jena, Germany)
- Varun Shridar | 2015 Master student (Technische Universitat Darmstadt. Germany)
PROJECTS
| NATIONAL PROJECTS | FINANCER | PI |
|---|---|---|
| IBEC’s International PhD Progamme fellowship (2018-2022) | Spanish Ministry of Economy and Competitiveness | Xavier Arqué |
| FPI fellowship (2020 – 2024) | Spanish Ministry of Economy and Competitiveness | Noelia Ruiz |
| INTERNATIONAL PROJECTS | FINANCER | PI |
|---|---|---|
| Beatriu de Pinós · Nanotroops4GT: Enzyme-powered Nanomotor Troops for Gene Therapy by Combining Biological Barriers Disruption and Enhanced Delivery of Nucleic Acid Therapeutics (2022 – 2025) | Agaur | MSCA – COFUND | Juan Fraire |
| i-NANOSWARMS · Cooperative Intelligence in Swarms of Enzyme-Nanobots (2020-2025) | European Comission, ERC-CoG | Samuel Sánchez |
| Beatriu de Pinós · 3DcolorBots: Versatile integration of structural color in 3D printed living robots for advanced control and sensing capabilities (2020 – 2023) | Agaur | MSCA – COFUND | Maria Guix |
| PRIVATELY FUNDED PROJECTS | FINANCER | PI |
|---|---|---|
| BLADDEBOTS Enzyme propelled nanobots as efficient nanotech platform for bladder cancer therapy (2021-2024) | Obra Social La Caixa, Health Research Call for Proposals | Samuel Sánchez |
| Feodor-Lynen Fellowship · Biohybrid wing microactuator based on integrated insect muscle cells (2020 – 2022) | Alexander von Humboldt Foundation | Veronika Magdanz |
| ENHANCEMENT OF THE THERAPEUTIC EFFECT OF GROWTH FACTORS USING SELF-PROPELLED NANOBOTS (2021-2022) | Fundació García-Cugat | Samuel Sánchez |
| FINISHED PROJECTS | FINANCER | PI |
|---|---|---|
| IBEC’s International PhD fellowships «la Caixa» Severo Ochoa (2016-2020) | Obra Social La Caixa | Rafael Mestre |
| Effect of a new cosmectic active ingredient in the regulation of muscular function (2019-2021) | Lipotec, S.A.U | Samuel Sánchez, Tania Patiño |
| MEDIROBOTS · MEdical micro- and nano-Robots for Molecular Imaging (2018 – 2021) | Fundación BBVA | Samuel Sánchez |
| TERANOBOTS · Nanorobots for bladder cancer theranostics (2019 – 2021) | Obra Social La Caixa / Caixaimpluse | Samuel Sánchez |
| BOTSinFLUIDS · Motion of biocatalytic nanobots in biological fluids and complex media for efficient drug delivery» (2019 – 2021) | Spanish Ministry of Science, Innovation and Universities, Retos investigación: proyectos I+D | Samuel Sánchez |
| FPI fellowship (2017 – 2021) | Spanish Ministry of Economy and Competitiveness | Lucas Palacios |
| IBEC’s International PhD fellowships Severo Ochoa (2016-2020) | Spanish Ministry of Economy and Competitiveness | Ana C. Hortelão |
| Smart nano-bio-devices group SGR Grups de recerca consolidats (2017-2021) | AGAUR, SGR | |
| BEST An integrated computational and experimental predictive framework for the chemo-hydrodynamics of active catalytic colloidal particles on complex environments (2018-2020) | IBEC | MSCA – COFUND | Marco de Corato |
| 2018 BIST Ignite Project · MOFtors- Enzyme-powered, metal-organic framework-based motors (2018) | Barcelona Institute of Science and Technology | Vincent Guillerm (ICN2), Tania Patiño (IBEC) |
| 2018 Ignite Project · ElectroSensBioBots Towards a new generation of programable 3D printed living biobots with nanoelectronics for sensing and local stimulation (2018) | Barcelona Institute of Science and Technology | Maria Guix (IBEC) Steven Walston (ICN2) |
| Efecto de un nuevo ingrediente activo nutraceutico en la regulación de la relajación muscular (2019-2020) | Lipofoods, S.L.U | Samuel Sánchez, Tania Patiño |
| LABPATCH · Lab-in-a-patch for PKU self-assessment (2018-2020) | European Commission, ERC-PoC | Samuel Sánchez |
| Juan de la Cierva Incorporación · 3D printed soft robotics for lab on a chip applications (2018-2020) | Spanish Ministry of Economy and Competitiveness | Maria Guix |
| ENZWIM Nanomotores de nanopartículas mesoporosas impulsados por enzimas (2017-2019) | Spanish Ministry of Economy and Competitiveness, Explora | Samuel Sánchez |
| BEST · Smart core-double-shell nanoparticles for specific and effective action against bacterial infection at different environments (2017-2019) | IBEC | MSCA – COFUND | Diana Vilela |
| Juan de la Cierva Formación (2017-2019) | Spanish Ministry of Economy and Competitiveness | Paul Soto |
| Microcleaners Active microcleaners for water remediation (2016-2018) | European Commission, ERC-PoC | Samuel Sánchez |
| MicroDia Sistemas Lab-on-a-chip basados en micro-nanomotores para el diagnóstico de enfermedades (2016-2018) | Spanish Ministry of Economy and Competitiveness, Retos investigación: Proyectos I+D | Samuel Sánchez |
| BEST (2016-2018) | IBEC | MSCA – COFUND | Agostino Romeo |
| Juan de la Cierva Formación (2016-2018) | Spanish Ministry of Economy and Competitiveness | Tania Patiño |
| LOC-Systems based on Nano/Micromachines for Food Safety Applications (2014-2016) | Alexander von Humboldt Foundation | Diana Vilela |
| Mesoporous Silica Micro/Nano-motors as Active Drug Delivery Vehicles (2014-2016) | Alexander von Humboldt Foundation | Ma Xing |
| LT-NRBS Lab-in-a-tube and Nanorobotic biosensors (2013-2017) | European Commission, ERC-StG | Samuel Sánchez |
PUBLICATIONS
For a list of publications prior to joining IBEC, visit the MPI for Intelligent Systems website.
EQUIPMENT
Microscopy
- Leica THUNDER Imager Live Cell & 3D Cell Culture with Computational Clearing to obtain high-speed and high-quality imaging of thick 3D dimensional specimens (Leica Microsystems)
- Leica DMi8. Inverted Fluorescent microscope with cell incubator, galvo stage for 3D tracking (Leica Microsystems)
- Leica DMI3000B. Inverted Fluorescent microscope (Leica Microsystems)
- Leica DMi1. Inverted microscope for Cell Cultures (Leica Microsystems)
- Leica DM2500MH. Upright microscope (Leica Microsystems)
Characterization
- Leica EM ACE600. High vacuum sputter & carbon thread coater (Leica Microsystems)
- Rheometer MCR 702. Dynamic mechanical Analyzer (Anton Paar)
- Dynamic Light Scattering & Z-Potential (Wyatt)
- UV-Visible Spectrometer (Analytik Jena)
3D Printing
- LumenX Bioprinter (Cellink)
- Form 2 3D printer (Formlabs)
- Inkredible+ 3D Bioprinter (Cellink)
Surface treatment
- Oxygen Plasma cleaner (Deiner Electronics)
- Spin coater (Laurell)
- Langmuir Blodgett (KSV NIMA)
- UV Irradiation System (Vilber Lourmat)
Biospace
- Biological Safety Cabinet Bio II Advance Plus (Telstar)
- Incubator Galaxy170 S (Eppendorf)
- Orbital Shaker-Incubator ES-20 (Biosan)
- Water bath VWB2 (VWR)
Chromatography
- Fast Protein Liquid Chromatography (Bio-Rad)
Sensing & electronics
- Autolab Galvostat/Potentiostat (Metrohm)
- Wave form source; Voltage amplifier (Tabor Electronics)
- Oscilloscope (Rigol)
- Portable Potentiostat-Galvanostat and Multiplexer (PalmSens)
- DC power supply (Hameg)
Microfluidics
- MFCS-EZ Microfluidic flow control system (Fluigent)
- AL4000 Aladdin Double Syringe Pump (WPI)
Recording cameras
- Video camera (1000+ fps) (Hamamatsu)
- High speed camera (10000+ fps) (Vision Research)
- CCD video camera (100fps) (Thorlabs)
Others
- Centrifuge (Eppendorf)
- Test tube heater; Eppendorf tube Shaker (Hach)
- Sonicator (VWR)
- Sonicator (Branson)
- Vortex (VWR)
- TOC Analyser (Analytik Jena)
- Homogenizer (BennetSc)
- Non-Magnetic Stirrer (Daihan)
- Thermolyne Furnace (Thermo Scientific)
- Hydrothermal Reactor (Berghof)
- DUO 3 Dual Stage Rotary Vane Vacuum Pump (Pfeiffer Vacuum)
COLLABORATIONS
- Prof. Kevin Braeckmans
Ghent University, Belgium - Prof. Katrien Remaut
Ghent University, Belgium - Prof. Cristina Fornaguera
Institut Químic de Sarrià (IQS), Spain - Prof. José Garrido
Catalan Institute of Nanosciences and Nanotechnology-ICN2, Spain - Prof. Ramón Martínez Mañez
Universidad Politécnica de Valencia, Spain - Prof. Jan van Hest
Eindhoven University of Technology, Netherlands - Prof. Loai Abdelmohsen
Eindhoven University of Technology, Netherlands - Prof. Xing Ma
Harbin Institute of Technology (Shenzhen), China - Prof. Lei Wang
Harbin Institute of Technology (HIT), China - Prof. Islam S. M. Khalil
University of Twente, Netherlands - Dr. Simó Schwartz
Vall d’Hebron Research Institute (VHIR), Spain - Dr. Toni Vilaseca
Hospital Clínic de Barcelona, Spain - Prof. Lorenzo Albertazzi
Eindhoven University of Technology, Netherlands - Prof. Esther Julián Gómez
Universitat Autònoma de Barcelona (UAB), Spain - Prof. Xiaohui Yan
Xiamen University, China - Prof. Adolfo G. Grushin
Institut Néel (part of CNRS), France - Prof. Eduard Torrents Serra
Institute for Bioengineering of Catalonia (IBEC), Spain - Prof. Islam S. M. Khalil
University of Twente, Netherlands - Núria Almiñana Domenech, Mauricio Valerio-Santiago
Lubrizol Life Science Beauty, USA - Prof. Anna Roig
Materials Science Institute of Barcelona (ICMAB-CSIC), Spain - Prof. Ignacio Pagonabarraga
University of Barcelona, Spain - Prof. Vincent Guillem
KAUST - Prof. Marco Filice
Universidad Complutense de Madrid CNIC, Spain - Prof. Romain Quidant
ETH Zürich, Swtizerland - Prof. Silvia Osuna
University of Girona, Spain - Prof. Hailin Huang
Harbin Institute of Technology (HIT), China - Prof. Qiang He
Harbin Institute of Technology (HIT), China - Prof. Joseph Wang
University of California San Diego (UCSD), USA - Prof. D.P. Kim
National Center of Applied Microfluidic Chemistry, Department of Chemical Engineering, POSTECH (Pohang University of Science and Technology), Korea - Prof. S. Dietrich, Dr. M. Popescu, M. Tasinkevych, Dr. W. Uspal
Theory of Soft Condensed Matter, MPI for Intelligent Systems, Stuttgart, Germany - Prof. M. Sitti
Physical Intelligence department, MPI for Intelligent Systems - Prof. R. Di Leonardo
Universtità La Sapienza, Rome, Italy - Prof. J. Sort, Dr. Eva Pellicer
Physics Department, Universitat Autònoma de Bellaterra (UAB), Spain - Dr. D. Esqué
The School of Materials, The University of Manchester, UK - Dr. J. Llop
CIC BiomaGUNE, San Sebastián, Spain - Prof. F. Ricci
Dipartimento di Scienze e Tecnologie Chimiche Università di Roma Tor Vergata, Rome, Italy - Dr. Ll. Soler
Institute of Energy Technologies (INTE), UPC (ETSEIB), Barcelona - Prof. E. Shäffer
Center for Plant Molecular Biology (ZMBP), University of Tübingen, Germany - Dr. L. Albertazzi
Nanoscopy group, IBEC - Prof. J. Samitier
NanoBioengineering Group, IBEC - Dr. D. Caballero
University of Minho, Portugal - Prof. R. Voituriez
CNRS/Université Pierre et Marie Curie, Paris, France - Dr. R. Artuch
Laboratorio de enfermedades metabólicas hereditarias, Hospital Sant Joan de Déu, Barcelona.
NEWS
IBEC y ICMS se reencuentran en su Simposio Anual en colaboración
Hoy, 14 de marzo, se ha celebrado el simposio conjunto ICMS-IBEC. Un evento coorganizado por el IBEC y el Instituto de Sistemas Moleculares Complejos (ICMS). Durante la jornada, investigadores del IBEC y del ICMS han compartido sus áreas de investigación, buscando fortalecer los lazos científicos entre ambas instituciones.
El IBEC impulsa el diálogo sobre innovaciones en medicina personalizada y terapias emergentes en la Barcelona Health Innovation Week
Hoy, 14 de febrero el IBEC ha organizado la mesa redonda «Retos en innovación en medicina personalizada y terapias emergentes». El acto forma parte de la Barcelona Health Innovation Week, organizada por Biocat. Fue un diálogo en el que expertos de diferentes ámbitos pudieron compartir sus perspectivas sobre cómo identificar oportunidades para impulsar el uso de nuevas tecnologías en el campo de la salud.
Laboratory Technician for the Smart Nano-Bio-Devices (Ref. LT_SS)
Ref: LT_SS // Deadline 24/02/2024
Expertos en nanomedicina se reúnen en el Nanodía Mundial Contra el Cáncer
Un año más, expertos en nanomedicina de diferentes campos se han reunido en Barcelona con motivo del Día mundial Contra el Cáncer. La reunión ha sido una oportunidad para dar a conocer las últimas innovaciones en materia de nanomedicina contra el cáncer, con temas que van desde el diagnóstico precoz, la liberación controlada de fármacos o la radioterapia con nanopartículas.
Nanorrobots contra el cáncer de vejiga
HERALDO DE ARAGÓN
Nanorobots tracten per primera vegada un tumor
TV3 / Telenotícies
ERC Workshop
Crafting a Winning ERC Proposal: A Workshop with ERC officers and grantees
JOBS
We are happy to receive CVs and enquiries from talented individuals. Prospective students and staff are encouraged to contact us to discuss possibilities. Please feel free to suggest new projects, areas of research or new ideas.
Current job openings in the group are listed on the jobs page.
Laboratory Technician at the Smart Nano-Bio-Devices Research Group (Ref: LT_SS)
Ref: LT_SS // Deadline: 20/03/2024
Postdoctoral researcher at the Smart Nano-Bio-Devices Research Group (Ref.: PD_MOB_SS)
Ref: PD_MOB_SS // Deadline: 17/03/2024
Postdoctoral researcher at the Smart Nano-Bio-Devices Research Group (Ref.: PD_SS)
Ref: PD_SS // Deadline: 15/10/2023
Postdoctoral researcher at the Smart Nano-Bio-Devices Research Group (Ref: PD_SS)
Ref: PD_SS // Deadline: 28/07/2023
Predoctoral researcher at the Smart Nano-Bio-Devices Research Group with in vivo experience (Ref: Phd_IV_SS)
Ref: Phd_IV_SS // Deadline: 28/07/2023
Laboratory Technician at the Smart Nano-Bio-Devices Research Group (Ref.: LT_SS)
Ref: LT_SS // Deadline: 03/04/2023
Predoctoral researcher at the Smart Nano-Bio-Devices Research Group (Phd_SS)
Ref: Phd_SS // Deadline: 06/04/2023
Administrative Assistant (Ref. AA_SS)
Ref: AA_SS // Deadline: 21/04/2023
INVITED TALKS
Invited talks
- Dr. Juan Fraire | Invited speaker at the nano bio&med 2022 Conference | Light-Triggered Vapor Nanobubbles and Nanomotors for Drug Delivery Applications | 22-24.11.2022Barcelona, Spain
- Prof. Samuel Sánchez | Invited speaker at the ACM International Conference on Nanoscale Computing and Communication | Swarms of chemically powered nanobots as smart nanovehicles | 06.10.2022 ACM NanoCom 2022 || KeynotesBarcelona, Spain
- Prof. Samuel Sánchez | Invited speaker at the Workshop on Future of nanomachines organized by IBS of Nanomedicine Institute | Next generation of autonomous Hybrid Robots | 10.11.2021Seoul, South Korea
- Prof. Samuel Sánchez | Invited speaker at the IBS Forum on Nanomachines for Biotechnology and Medicine | Swarms of Hybrid and biocompatible Nanobots for Cancer Nanomedicine | 08-09.11.2021 https://www.ibs-conference.org/2021/nm/Seoul, South Korea
- Prof. Samuel Sánchez | Keynote speaker at Innodays EKFZ | Next generation of medical autonomous microrobots | 25.9.2021. https://digitalhealth.tu-dresden.de/innodays/Dresden, Germany
- Prof. Samuel Sánchez | Keynote speaker at 3-M Nano conference (International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale) | Swarms of hybrid nanobots move collectively in mice’s bladder | 02-06.08.2021Online Conference
- Dr. Maria Guix | Invited speaker and panelist in the round table at the Biohybrid robotics workshop, organized in the framework of the International Converence of Biomimetics and Biohybrid Systems, Living Machines 2021 | High performance hybrid robots based on skeletal muscle tissues | 30.07.2021Online workshop
- Prof. Samuel Sánchez | Artificial Molecular Machines workshop, organized by (Merck KGaA, San José, CA, USA) | How to engineer biofriendly nanobots and bring them from in vitro to in vivo | 02.07.2021Online seminar
- Prof. Samuel Sánchez | Organized by ACER Recerca | Premi Extraordinari de Batxillerat | 30.06.2021Online seminar
- Dr. Maria Guix | I encuentro de Mujeres en la Ingeniería, organized by the groups of Afinidad Women in Engineering (WIE) of several universities in Equador | Trayectoría en la ciencia e investigación de alto impacto | 21.06.2021Online seminar
- Prof. Samuel Sánchez | Bienal Ciudad y Ciencia, organized by Barcelona city council | La nit – Pecha Kucha express: art, ciència, tecnologia | 11.06.2021Barcelona, Spain
- Dr. Maria Guix | IEEE NTC YP R9 Webinars, organized by EEE Nanotechnology Council (NTC) Young Professions in the IEEE Latin America (IEEE Region 9) | 3D technologies for the development of living robots | 10.06.2021Online seminar
- Prof. Samuel Sánchez | ICRA 2021 workshop on micro-nano swarm robotics | Monitoring swarms of enzyme-powered nanobots within mouse bladder | 04.06.2021Online Workshop
- Dr. Maria Guix | Maker Faire Galicia | Panelist in round table «Conociendo al Homo Deus» | 03.06.2021Online Career Fair
- Prof. Samuel Sánchez | Nanorobots for Biotechnology, Nature Conference | Microrobots and nanorobots with enzymes: a biocompatible solution towards biomedical applications | 25.05.2021Online Conference
- Dr. Maria Guix | The MultiScale Talk Series, organized by Dr. Zoran Cenev (Aalto University) | Self-stimulating skeletons for living robotics platforms | 24.05.2021Online Seminar
- Dr. Veronika Magdanz | The MultiScale Talk Series, organized by Dr. Zoran Cenev (Aalto University) | Biohybrid microbots – What Sperm can teach us about microrobotics | 10.05.2021Online Seminar
- Prof. Samuel Sánchez | Gira FPdGi, Member of the roundtable on the final act | 29.04.2021Alicante, Spain
- Prof. Samuel Sánchez | Clustering and Global Challenges” (CGC2021) international conference | Swarms of nanorobots: smart nanoparticles swimming in vivo | 09.04.2021Online Conference
- Prof. Samuel Sánchez | 3rd MANA reunion Workshop (NIMS, Japan) | Bioengineering hybrid robots: from nanobots to 3D BioRobots | 04-05.03.2021Online Seminar
- Prof. Samuel Sánchez | Co-organizer and speaker | Crafting a Winning ERC Proposal: A Workshop with ERC officers and grantees | 18.02.2021Online Workshop
- Rafael Mestre | Workshop: Applications of Functional Printing and Bio-Printing in the Health Sector, organized by Grupo INTERPLATAFORMAS: Plataforma3NEO, FENIN, NANOMED AIMPLAS y el Cluster de Impresión Funcional | November 2020
Invited speaker and round-table
Online Workshop - Rafael Mestre | Workshop: 3D Bio-printing: advances and applications for the future of medicine, organized by Isaza Scientific (S.A. Madrid) | October 2020
Invited speaker
Online Workshop - Dr. Tania Patiño | 2020 BIST Conference, Building a sustainable world together | October 2020
Speaker at Roundtable I: MOFs, a Powerful Framework for Pollution Remediation
Online Conference - Dr. Tania Patiño | 2020 BIST Conference, Building a sustainable world together | October 2020
Speaker at Roundtable I: MOFs, a Powerful Framework for Pollution Remediation
Online Conference - Prof. Samuel Sánchez | Florida A&M University – Florida State University (FAMU-FSU) CBE Seminar Series | 23.10.2020Online Seminar
- Prof. Samuel Sánchez | NanoBio&Med Online | July 2020Online Conference
- Dr. Maria Guix | International Friends Talk Science | July 2020Organized by Nanobioelectronics & Biosensors GroupOnline Seminar
-
Prof. Samuel Sánchez | IBEC Online Seminar | 04.05.2020
BioEngineering Hybrid Robotic Machines: from nanobots to 3D Bioprinted Robots
Online Seminar - Dr. Marco de Corato | Seminar at l’École Polytechnique de Paris | May 2020Organized by Laboratoire d’hydrodynamiqueOnline Seminar
- Prof. Samuel Sánchez | European Research Council (ERC) Conference : “Frontier Research: Creating Pathways to Sustainability” | Keynote speaker and discussion panellist | 2.12.2019
Tiny self-powered submarines: Nanorobots for clean water
Brussels, Belgium - Prof. Samuel Sánchez | NanoBio&Med 2019 | Keynote talk | 20.11.2019
Nanomotors: Artificial active matter for nanomedicine
Barcelona, Spain - Prof. Samuel Sánchez | Invited AMN Seminar, CEITEC Nanorobots Center | 15.10.2019
Nanorobots as novel theranostic tools: smart drug delivery and imaging
Brno, Czech Republic - Prof. Samuel Sánchez | Invited Seminar, School of Materials Science and Engineering HIT | 04.09.2019
Nanomotors for environmental and biological applications
Shenzhen, China - Prof. Samuel Sánchez | Invited Seminar, Engineering Living Systems. Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences | 03.09.2019
Shenzhen, China - Prof. Samuel Sánchez | Invited Seminar, SUSTECH University | 02.09.2019
Nanorobots and Soft Robots
Shenzhen, China - Prof. Samuel Sánchez | Invited Seminar, Chemical Engineering School, HIT Harbin | 29.08.2019
Chemically powered nanomotor
Harbin, China - Prof. Samuel Sánchez | Keynote talk, Workshop on nanorobots for medicine, HIT Harbin | 28.08.2019
Chemical nanorobots for medicine
Harbin, China - Prof. Samuel Sánchez | Invited talk, 2nd International Conference on Micro/Nanomachines | 28.08.2019
Enzyme-powered hybrid micro-nano-motors: Fundamentals towards applications
Harbin, China - Prof. Samuel Sánchez | Invited talk, Xiamen University | 24.08.2019
Nanomotors and Biobots
Harbin, China - Prof. Samuel Sánchez | International Workshop – Microscale Motion and Light | 24.08.2019
Enzyme-powered nanomotors from fundamentals to applications
Dresden, Germany - Dr. Maria Guix | International Workshop – Microscale Motion and Light | July 2019
Organized by Max Planck Institute for the Physics of Complex Systems
Dresden, Germany - Prof. Samuel Sánchez | IBEC-ICMS Symposium | 16.07.2019
Engineering living systems across length scales
Barcelona, Spain - Prof. Samuel Sánchez | Invited seminar, University Tor Vergata | 15.07.2019
NanoBOTs to 3D BioBOTs as Future tools
Rome, Italy - Prof. Samuel Sánchez | The Hamelin Symposium on Medical Robotics | 26.06.2019
Enzyme-powered Nanorobots Towards their Applications in vivo: Enhanced Delivery, Sensing and Imaging
London, UK - Prof. Samuel Sánchez | Plenary talk, Opening Symposium B-Cube | 10.05.2019
Hybrid nanomotors: bioengineered active nano-systems powered by enzymes
Dresden, Germany - Prof. Samuel Sánchez | University of Tübingen | 07.05.2019
Active nanoparticles in fluids
Tübingen, Germany - Prof. Samuel Sánchez | Invited ERC-Seminar | 03.05.2019
Nanobots to 3D BioBots as future tools in robotics and medicine
Brussels, Belgium - Dr. Maria Guix | Seminar at Swiss Federal Laboratories for Materials Science | May 2019
Thun, Switzerland - Rafael Mestre | 1st Cellink Collaborative Partnership | May 2019
Milan, Italy - Prof. Samuel Sánchez | Biennal Ciutat I Ciència, La Pedrera | February 2019
Nanorobots para nuevas terapias y limpieza de agua
Barcelona, Spain - Prof. Samuel Sánchez | MRS Fall Meeting | 28.11.2018
Bioengineering hybrid machines: from Nanobots to 3D Biobots
Boston, USA - Dr. Maria Guix | 9 días dimension nano | November 2018
Organized by Sociedad Catalana de Nanociencia y Nanotecnología honoring the end of Feynman’s year
Barcelona, Spain - Prof. Samuel Sánchez | Keynote talk, NanoBio&Med 2018 | 28.11.2018
Bioengineering hybrid machines for nanomedicine and soft robotics
Barcelona, Spain - Prof. Samuel Sánchez | Invited Seminar, ICMS at TU Eindhoven | 13.09.2018
Enzyme powered nanomotors from fundamentals to drug delivery
Eindhoven, Spain - Prof. Samuel Sánchez | Keynote talk, London International Youth Science Forum (LIYSF) | 01.08.2018
Nanorobots as future tools in nanomedicine (and more)
London, UK - Prof. Samuel Sánchez | Invited talk, Columbia University, Molecular Machines Workshop | 28.05.2018
Engineering Hybrid Machines: from nanobots to 3D BioBots
New York City, USA - Prof. Samuel Sánchez | Invited Seminar, Synthetic Biogoly Lab/Massachusets Institute of Technology | 25.05.2018
Synthetic multifunctional Nanoswimmers
Cambridge, USA - Prof. Samuel Sánchez | Invited Seminar, Standford Medical School, Molecular Imaging Program at Stanford (MIPS) Department | 01.02.2018
Artificial Nanoswimmers as future tools in nanomedicine
San Francisco, USA - Prof. Samuel Sánchez | Panel Chair Talk, Aspen School of Physics | January 2018
Fundamentals of active particles
Aspen, USA - Prof. Samuel Sánchez | Invited Talk, El País con tu futuro/Kinepolis | 21.12.2017
Nanorobots
Madrid, Spain - Prof. Samuel Sánchez | Plenary talk, Dept. Mat. Sciences, Physical, Organic and Inorganic Chemistry, University of Barcelona | 15.12.2017
The chemistry and the materials of Micro-/Nano-machines
Barcelona, Spain - Prof. Samuel Sánchez | Keynote talk, II Congreso Nacional de Jóvenes Investigadores en Biomedicina | 23.11.2017
Nanorobots and their future in NanoBiomedicine
Valencia, Spain - Prof. Samuel Sánchez | Keynote talk, NanoBio&Med 2017| 22.11.2017
Enzyme Catalysis to Power Nanovehicles Towards Nanomedicine
Barcelona, Spain - Prof. Samuel Sánchez | Keynote talk, Nanomedicie Summer School, Hospital Vall d’Hebron | 29.09.2017
Hybrid Micro- and Nano-machines towards their applications in Nanomedicine
Barcelona, Spain - Prof. Samuel Sánchez | Keynote talk, Workshop Chem BioNano, CSIC | 14.09.2017
Biohybrid Robotic Systems: Learning From Nature
Barcelona, Spain - Prof. Samuel Sánchez | Invited talk, International Conference on Nano-Micro-Machines | 26.08.2017
Chemically and Biologically Powered Micromachines
Wuhan, China - Prof. Samuel Sánchez | Invited Seminar, Institut Català d`Investigació Química (ICIQ) | 08.07.2017
Chemically engineered structures for micromotors
Tarragona, Spain - Prof. Samuel Sánchez | Invited talk, Bojos per la Química | 08.07.2017
Química en movimiento: Energía química para propulsar NanoRobots
Tarragona, Spain - Prof. Samuel Sánchez | Invited talk, Institut d’Investigació Sanitària Pere Virgili (IISPV) | 07.07.2017
NanoRobots and their potential applications in biomedicine
Reus, Spain - Prof. Samuel Sánchez | Opening talk, BIYSC, La Pedrera House | 11.07.2017
Samuel and Nanorobots, a Fantastic Voyage
Barcelona, Spain - Prof. Samuel Sánchez | Invited Seminar, Radboud University | 14.06.2017
Chemically engineered architectures for nanomotors
Nijmegen, The Netherlands - Prof. Samuel Sánchez | Plenary talk, Jornades de Biologia Molecular | 13.06.2017
Biohybrid Robotic Systems: Learning From Nature
Barcelona, Spain - Prof. Samuel Sánchez | Plenary talk, EChems Conference | 09.06.2017
Powering tiny particles with catalysis: self-powered nanomachines
Milano Maritima, Italy - Prof. Samuel Sánchez | Keynote talk, Catalan Society of Chemistry | 03.05.2017
Nanorobots for biomedical and environmental applications
Barcelona, Spain - Prof. Samuel Sánchez | Invited talk, International Center for Leadership Development (CEDE) | 05.04.2017
Experimentando un viaje alucinante
Barcelona, Spain - Prof. Samuel Sánchez | Invited talk, Universidad Autónoma Metropolitana (UAM) | 12.12.2016
Nanomáquinas, ciencia ficción o realidad
Mexico City, Mexico - Prof. Samuel Sánchez | Invited talk, NanoBio&Med 2016 | 22.11.2016
Chemical Nanomachines as active drug nanovehicles
Barcelona, Spain - Prof. Samuel Sánchez | Invited talk, Universitat Pompeu Fabra | 09.11.2016
Nanomicrorobots what for
Barcelona, Spain - Prof. Samuel Sánchez | Invited talk, University of Rome Tor Vergata | 02.11.2016
Enzyme powered nanomachines: Science fiction or reality
Rome, Italy - Prof. Samuel Sánchez | Opening talk/Master of ceremony. MIT Innovators U35 Awards | 27.10.2016
Madrid, Spain - Prof. Samuel Sánchez | Invited talk, Master of Excelence Awards of Fundació Catalunya-La Pedrera | 06.10.2016
La ciencia, un viaje alucinante
Barcelona, Spain - Prof. Samuel Sánchez | Invited talk, Colloquium at the Royal Academy of Sciences | 22-23.09.2016
Nanobots: catalysis powered nanoparticles
Amsterdam, The Netherlands - Prof. Samuel Sánchez | Keynote talk, GABBA International Conference 2016 | 15.07.2016
Nanorobots: smart self-powered nanoparticles towards biomedical applications
Porto, Portugal - Prof. Samuel Sánchez | TED Talk, TEDx Plaça del Fòrum | 28.05.2016
Nanorobots
Tarragona, Spain - Prof. Samuel Sánchez | Public talk, Caixa Forum | 15.04.2016
Nanorobots: esos diminutos submarinos que nos ayudarán en el futuro
Girona, Spain - Prof. Samuel Sánchez | Opening Lecture, PhD award ceremony/ Autonomous University of Barcelona | 08.04.2016
Cómo experimentar un viaje alucinante
Bellaterra, Spain - Prof. Samuel Sánchez | Invited talk, International Course on Leadership Development | 16.03.2016
Cómo experimentar un viaje alucinante
Granada, Spain - Prof. Samuel Sánchez | Invited Lecture, Award ceremony Joven Relevante | 01.03.2016
Nano-Robots and Nano-Machines: how small can you dream them?
Barcelona, Spain - Prof. Samuel Sánchez | Invited talk, International workshop Soft Matter at interfaces | 27-29.02.2016
Experiments on active matter at the micro- and nano-scale
Tegernsee, Germany - Prof. Samuel Sánchez | Invited Lecture, GABBA International PhD program | 23.02.2016
Nanorobots: the future smart tools in medicine?
Porto, Portugal - Prof. Samuel Sánchez | Invited Lecture, Acte premis Catalunya-La Pedrera | 19.02.2016
Fantastic Voyage: Back where everything started
Mont Sant Benet, Spain - Prof. Samuel Sánchez | Invited Lecture, Círculo Ecuestre de Barcelona | 11.02.2016
Nanobots Relevantes
Barcelona, Spain - Prof. Samuel Sánchez | Invited talk, Global Robots Expo | 27-19.01.2016
NanoBots for Medicine and more
Madrid, Spain - Prof. Samuel Sánchez | Invited Seminar, POSTECH/Chemical Engineering Department | 3-4.12.2015
Engineering small self-powered nano-bio-devices
Korea, Republic of (South Korea) - Prof. Samuel Sánchez | Invited Seminar, POSTECH/Chemical Engineering Department | 1-2.12.2015
Ultra-compact smart nano-bio-devices for (bio)sensing and nanorobotics
Korea, Republic of (South Korea) - Prof. Samuel Sánchez | Invited Seminar, Gordon Conference Oscillations Instabilities in Chemical Systems | 22-25.09.2015
Strategies for controlling and guiding catalytic micro-motors
Stowe, USA - Prof. Samuel Sánchez | Invited talk, Summer School Jülich Forschungzentrum | 21.09.2015
Microswimmers based on tubular micro- and nanojets
Aachen, USA - Prof. Samuel Sánchez | Highlight talk, EUROMAT | 22.09.2015
Synthesis of chemically powered nanomotors
Warsaw, Poland - Prof. Samuel Sánchez | Keynote Speaker, TNT Conference | 07-11.09.2015
Nano-bots as future trends in nano-bio-medicine
Toulouse, France - Prof. Samuel Sánchez | Invited Appearance at MIT TR35 Germany representing Spanish innovators U35 | June 2015
Berlin, France - Prof. Samuel Sánchez | Invited talk, Engineering Chemical Complexity | 22.06.2015
Engineering Chemical Micro-and Nanomotors
Munich, Germany - Prof. Samuel Sánchez | Plenary talk, Jornades Doctorals, Universitat Autònoma de Barcelona | 27.05.2015
Fantantic Voyage: where everything started
Bellaterra, Spain - Prof. Samuel Sánchez | Invited talk, ZCAM Conference | 22.05.2015
Active Colloidal micromotors
Zaragoza, Spain - Prof. Samuel Sánchez | Invited talk, TAU-IBEC Symposium | 16.05.2015
Smart Nano-Bio-Devices
Barcelona, Spain - Prof. Samuel Sánchez | Introductory Speaker, GAFOE Meeting | 15.04.2015
Potsdam, Spain - Prof. Samuel Sánchez | Tutorial Lectures, MRS Tutorial Spring Meeting | 08.04.2015
Bio-inspired Micro-and Nanomachines
San Francisco, USA
POSTER AND ORAL CONTRIBUTIONS
- Dr. Maria Guix | Workshop for Early-Career Researchers at EMBL Barcelona, organized by EMBL Barcelona | Biohybrid soft robots with self-stimulating skeletons | 23.06.2021
Oral presentation. Online Workshop - Dr. Maria Guix | Workshop on Multicellular Engineered Living Systems (M-CELS), organized by MIT | Smart training of 3D engineered living robots | 02.06.2021
Poster presentation. Online Workshop -
Dr. Maria Guix | Nanorobots for Biotechnology, Nature Conference | 3D printed living robots with self-stimulating skeletons | 26.05.2021
Oral presentation. Online Conference - Xavier Arqué | IBEC PhD Discussions | April 2021
Oral presentation. Online seminar - Xavier Arqué | 13th IBEC Symposium, Bioengineering for Future & Precision Medicine | October 2020
Poster contribution. Online conference - Ana C. Hortelão | 13th IBEC Symposium, Bioengineering for Future & Precision Medicine | October 2020
Poster contribution. Online conference - Dr. Veronika Magdanz | 13th IBEC Symposium, Bioengineering for Future & Precision Medicine | October 2020
Video contest and poster contribution. Online conference -
Dr. Maria Guix | 13th IBEC Symposium, Bioengineering for Future & Precision Medicine | October 2020Smart skeletons for 3D printed living biobots
Online Symposium – Best flash presentation - Dr. Veronika Magdanz | NanoBio&Med Online | July 2020
Oral contribution. Online Conference - Dr. Maria Guix | NanoBio&Med Online | July 2020
Oral contribution. Online Conference - Dr. Maria Guix | NanoBio&Med | November 2019
Oral contribution. Barcelona, Spain - Xavier Arqué | International Workshop – Microscale Motion and Light | July 2019
Poster contribution. Dresden, Germany - Rafael Mestre | 8th Living Machines Conference | July 2019
Oral contribution. Osaka, Japan - Rafael Mestre | NanoBio&Med | November 2018
Oral contribution. Barcelona, Spain - Xavier Arqué | NanoBio&Med | November 2019
Oral contribution. Barcelona, Spain - Xavier Arqué | Workshop on Molecules, Materials, Devices and Systems in Medicine | May 2018
Poster contribution. New York City, USA - Xavier Arqué | NanoBio&Med | November 2017
Poster contribution. Barcelona, Spain
HIGHLIGHTS
Outreach activities
09-13/10/2023| MARSS 2023 – International Conference on Manipulation, Automation and Robotics at Small Scales at the New York University of Abu Dhhabi (NYUAD)
Judith Fuentes Llanos, Shuqin Chen and Samuel Sánchez Ordóñez attended MARSS 2023, the International Conference on Manipulation, Automation and Robotics at Small Scales. It was run by the microrobotic community and technically supported by IEEE-RAS and IEEE-NTC, and it was held at New York University Abu Dhabi (NYUAD).
During the Conference, Judith held a talk providing a more detailed insight into the work done in collaboration with Veronika Magdanz from University of Waterloo, Zoran Cenev from Aalto University, Maria Guix from Universitat de Barcelona, and Anna C. Bakenecker from Fraunhofer IMTE. The project focuses on the integration of ferrofluid into 3D bioprinted skeletal muscle-actuators, developing a so called ferromuscle. The team observed that the addition of the ferrofluid into the 3D printable bioink allowed them to fabricate muscle bioactuators that can be magnetically manipulated, that is, their directionality and motion can be controlled by the magnetic field. Also, they observed that the integration of this ferrofluid improved the contraction force of the ferromuscle threefold compared to the control muscle (without the ferrofluid). Their work continues, and the results are very promising.


31/05/2023| BLADDEBOTS nanobots reach the classroom through the Nanoinventum dissemination initiative
BLADDEBOTS is a research project from Fundación «la Caixa» led by Samuel Sánchez focused on the design of nanobots for the treatment of bladder cancer. With the aim of transmitting BLADDEBOTS research to society, Samuel Sánchez has collaborated with the Nanoinventum dissemination initiative, which brings nanotechnology closer to primary school classroom.
Using educational resources and creativity tools, the boys and girls participating in Nanoinventum designed nanobots to solve current problems related to the sustainability challenges of the 2030 agenda.
This year’s edition ended with a closing ceremony held at the Molins de Rei Municipal Sports Center on May 31, which was attended by more than 700 students from different schools throughout Catalonia. There, nearly 300 nanorobot models were presented to the jury.

at #molinsderei. #outreach ideas from the project Bladdebots from @CaixaResearch
@IBECBarcelona


10/02/2023| Meritxell Serra-Casablancas participates in the “100tífiques” programme during the International Day of Women and Girls in Science
During the International Day of Women and Girls in Science, Meritxell gave a talk to high school students from IE Sant Esteve (Castellar del Vallès) about her motivation to become a scientist and her day-to-day work in the lab, as part of the 100tífiques program (Fundació Catalana per a la Recerca i la Innovació). They shared a great discussion about science and the future of nanobots.

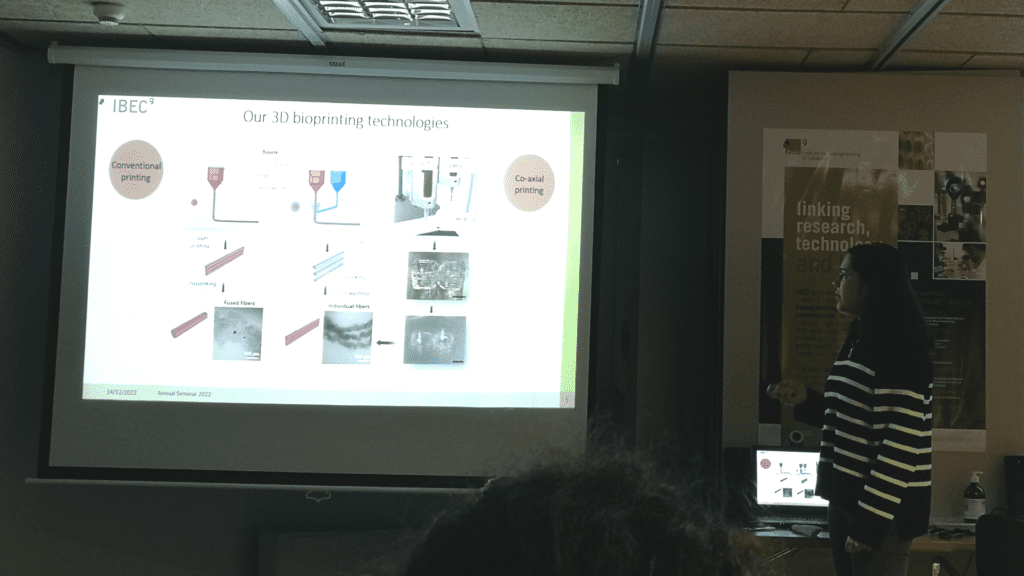
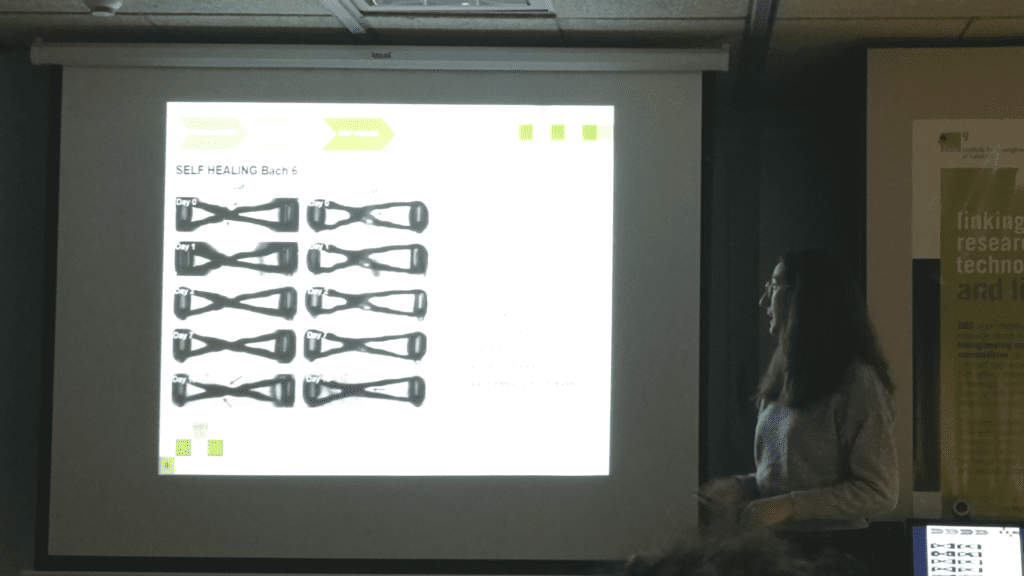
12-14/12/2022 | Group’s Annual Seminar
We had our group seminars (an internal scientific workshop) with lots of new and unpublished results open for discussions, brainstorming sessions, creative thinking and outstanding talks!
Day 1 opened the workshop with a Team brainstorming session pointing out the challenges and goals for 2023 in the field of nanomotors for (1) fundamental undertanding of nanobots and (2) biomedical applications. Many things in our minds, many ideas. Now it is time to tackle the challenges and go for it!
Day 2 was fully packed with seminars and discussions, with feedback from Samuel. Luckily we had some break for lunch! 😊
Day 3 brought us the Biobots and Bioactuators, becuase not everything is nano in the group!


Juan Fraire – Post-Doc Researcher

October-December 2022 |BLADDEBOTS Internship programme for undergraduate students
Undergraduate students, Jaume Ros Miralles and Filotea Crasovan Neacsu, performed an internship in the group within the Bladdebots project (CaixaHealth) under the supervision of Dr. Valerio Di Carlo, PhD student Meritxell Serra-Casablancas and Dr. Juan Fraire.
30/09/2022. Meritxell Serra-Casablancas gave a talk in the European Research Night 2022 (CosmoCaixa)
Researcher Meritxell Serra-Casablancas participated in the European Research Night 2022, where she gave a talk about the work conducted at the Smart Nano-bio-devices group, in which nanobots are used to treat bladder cancer. It was a delightful opportunity to share our latest scientific breakthroughs.
05/08/2022| Marc Canadell, from the “Joves i Ciència” Program, joined the Smart Nano-bio-devices Group for a research stay
The student Marc Canadell joined the group for a research stay within the “Joves i Ciència” program from Fundació Catalunya La Pedrera, under the supervision of Dr. Valerio Di Carlo and PhD student Meritxell Serra-Casablancas.
01/03/2022 | Meritxell Serra-Casablancas, Nanoexpert at Escola Lavínia
Meritxell Serra-Casablancas visited Escola Lavínia de Barcelona, as a Nanoexpert to talk about Nanomedicine with the students of the last grade of elementary school. The students shared with her their nanobot designs to present them to the Nanoinventum contest. They also brainstormed some ideas to be applied into the field of biomedicine.
Moltes gràcies Meritxell @IBECBarcelona per visitar-nos aquesta setmana! Ara els nanociencientícs de 6è enllestim maquetes!Li hem compartit les nostres idees sobre els nanorobots que hem dissenyat i ens ha donat consells i propostes de millora! pic.twitter.com/huhpB6Jtdy
— Escola Lavínia (@Escola_Lavinia) February 22, 2022

15/12/2021 | Visit at Natura Encesa at Pedralbes
Some of the group members were gathering at the Nature Encesa immersive experience at the Pedralbes gardens. Collective motion is everywhere if you carefully look at it!
12/11/2021 | Prof. Samuel Sánchez visits POSTECH in Korea
During his trip to Korea, Prof. Sánchez visited the IBS Center for Nanomedicine, he visited POSTECH. It was definitely a great experience to discuss science and discover korean culture!
30/07/2021 | Dr. Maria Guix, invited speaker and round table at the workshop «Biohybrid robotics», organized in the frameword of the Living Machines 2021
Dr. Maria Guix participated as an invited speaker and the round talbe of the Biohybrid Robotics Workshop organized in the framework of the International Living Machines 2021, being online due to the current COVID situation and which celebrates its 10th anniversary.
15/07/2021 | Laia Marcos Canal participates at the tribute to COVID victims, organized by Casa Real and Moncloa
Laia Marcos Canal, former Batx2Lab student supervised by Dr. Maria Guix, participated in a short video partly recorded at IBEC that was released during the tribute to COVID victims, in which differents personal situation during the pandemic were reflected. Laia was chosen for obtaining the best mark at the selectivity and participating at research related programs, like the BATX2LAB one.
* Check minutes: 35:20 – 38:27
11/06/2021 | Bienal Ciudad y Ciencia, Dissemination activity «Pecha Kucha express: art, science, technology»
Prof. Samuel Sánchez participated in the dissembination activity Pecha Kucha express in the framework of the Biennal Ciudad and Science, organized by the Barcelona city council. This successful event was followed in-person in an open space concept in Plaça Comercial in Barcelona.


03/06/2021 | Prof. Jingyao Tang, Guest Scientist at NBS Journal Club
Prof. Jinyao Tang, currently an Associate Professor in the Department of Chemistry at the University of Hong Kong, participated in our NBS Journal Club as a guest scientist to discuss from the electrokinetic effect in microswimmers swarms, a Journal club session hosted by Xavi Arqué and Ana Hortelao. We really enjoyed the discussion with Prof. Tang, and we are looking forward to keep in touch with his group!
24/05/2021 | Dr. Maria Guix, Talk at the MultiScale Talk Series, organized by Dr. Zoran Cenev (Aalto University)
Self-stimulating skeletons for living robotics platforms
10/05/2021 | Dr. Veronika Magdanz, Talk at the MultiScale Talk Series, organized by Dr. Zoran Cenev (Aalto University)
Biohybrid microbots – What Sperm can teach us about microrobotics
01/05/2021 | Meritxell Serra-Casablancas, Nanoinventum contest evaluator
Predoctoral researcher Meritxell Serra-Casablancas participated as a membre of the jury of the Nanoinventum contest. The 500 participants created almost 100 nanorobot models to tackle the Sustainable Development Goals (SDGs) of the UN’s 2030 Agenda. All the proposals were really innovative. Good job and congratulations to the winning models: “Nanoabella” (Escola Milà i Fontanals) and “Electrobio” (Escola Lavínia)!
28/04/2021 | Prof. Islam S. M. Khalil, Guest Scientist at NBS Journal Club

Prof. Islam S. M. Khalil, currently an Assistant Professor in the Department of Biomechanical Engineering at the University of Twente, participated in our NBS Journal Club as a guest scientist to discuss from the sensing capabilities of magnetotactic bacteria to the automation of helical-like motors for thrombosis treatment. Also, he briefly told us about his current research collaboration with the group member Dr. Veronika Magdanz. Thanks for you insightful talk and discussion Prof. Khalil, we are really looking forward to have you visting us in Barcelona soon!
29/03/2021 | Prof. Samuel Sánchez
Prof. Samuel Sánchez gave a talk at the Escoles del Pallars over the nanomotors impact in ours lives, entitled «Com els Nanorobots milloraran la nostra qualitat de vida».
26/02/2021 | Dr. Veronica Iacovacci, Guest Scientist at NBS Journal Club

Dr. Veronika Iacovacci, currently a Marie Curie Global Fellow jointly at The Chinese University of Hong Kong and Scuola Superiore Sant’Anna, joined us for the NBS Journal Club as a guest scientist to discuss about her previous and current work on SPECT Imaging with soft microrobots and the design of magnetic catheter. We really appreciate the time she spent with us and the fruitful discussion!
18/02/2021 | Prof. Samuel Sánchez | ERC Workshop
Prof. Samuel Sánchez co-organized the online ERC Workshop «Crafting a Winning ERC Proposal: A Workshop with ERC officers and grantees» and gave a talk on initial general tips, covering the myths, worries and fears and how to choose the right panel.


11/02/2021 | Dr. Maria Guix | 100tifiques
Virtual talk at the School Germans Corbella (Cardedeu)
in the framework of the 100tifiques event.
21/01/2021 | Dr. Toni Llopis and Dr. Loai Abdelmohsen, Guest Scientist at NBS Journal Club

Dr. Toni Llopis and Dr. Loai Abdelmohsen, researchers at the University of Twente kindly shared some time with us, discussing over some of his papers and also presenting a piece of their recent research work on artificial cells and communication between them and living entities, in order to develop personalized therapeutic treatments. We really appreciate their time and we thank them for the fruitful discussions!
04/12/2020 | Prof. Victoria Webster-Wood, Guest Scientist at NBS Journal Club

Prof. Victoria Webster-Wood, Assistan Professor from the Carnegie Mellon University (USA) kindly shared her latest research results and accepted our invitation to our Journal Club. We discussed over bio-robotics while discussing three relevant papers from her group presented by Veronika and Judith. We really enjoyed the JC and having her virtually in our lab!
05/11/2020 | Prof. Wei Wang, Guest Scientist at NBS Journal Club

Prof. Wei Wang, from Harbin Institute of Technology (Shenzhen) kindly accepted our invitation to our Journal Club, in order to first discuss two relevant papers from his group to our research, and later present his latest results in the same session. We really appreciate his time and and his insightful presentation!
28/10/2020 | Dr. Maria Guix | 13th IBEC Symposium
Dr. Maria Guix wins IBEC Symposium Award for the best flash presentation!

26/09/2020 | Rafael Mestre /Xavier Arqué / Dr. Maria Guix | Bojos i boges per la Bioenginyeria 2020
Session: Internalization of Nanomotors by cancer and non-cancer cells

September 2020 | Dr. Maria Guix | Batx2Lab program
Supervision of Sara González (Institut Jaume Almera, Vilassar de Dalt) during the short internship stay in the framework of Batx2Lab Program for the research work “La medecina regenerativa i les cèl·lules mare”, where she explored the creation of 3D printed muscles as models for personalized medicine. Dr. Maria Demestre taugh Sara about the insights of fluorescent microscopy and how it is apply to characterize skeletal muscle structure!
04/05/2020 | Samuel Sánchez | IBEC Online Seminar
BioEngineering Hybrid Robotic Machines: from nanobots to 3D Bioprinted Robots
07/03/2020 | Rafael Mestre /Xavier Arqué / Dr. Maria Guix | Bojos i boges per la Bioenginyeria 2020
Session: Internalization of Nanomotors by cancer and non-cancer cells

11/02/2020 | Dr. Maria Guix | 100tifiques
Talk at the School Puig-Agut in Manlleu

27/10/2019 | Xavier Arqué | Participation at “13a Festa de la Ciència”
Moll de la Fusta of Barcelona
July 2019 | Dr. Maria Guix | Batx2Lab program
Supervision of Laia Marcos (Institut Puig Castellar) during the short internship stay in the framework of Batx2Lab Program for the research work “Impressió 3D d’un dit bionic basat en cèl·lules musculars”
05/04/2019 | Prof. Samuel Sánchez | Plenary Talk at Ateneu Maó
04/04/2019 | Prof. Samuel Sánchez | Talk at High School center “Duc de Montblanc”

22/02/2019 | Dr. Maria Guix | 100tifiques
Talk at the School Escola Lluçanès in Prats de Lluçanès
09/02/2019 | Rafael Mestre | Biennal Ciutat i Ciència de Barcelona (La Pedrera)
Taller “Què és la Nanoescala i com ens afecta”

2019-2020 | Rafael Mestre/ Dr. Tania Patiño / Xavier Aqrué | Magnet program for educational innovation
In collaboration with the Fundació Biofill and Escola Gayarre
7/11/2018 and 21/11/2018 | Xavier Arqué | Workshops “Taller de la célula” at IBEC
07/11/2018 | Prof. Samuel Sánchez | Plenary talk at Setmana de la ciència
Teatre La Sala de Rubí
2017-2019 | Rafael Mestre | Workshops “Taller de liberación de fármacos” at IBEC
2019 | Dr. Tania Patiño / Rafa Mestre | Bojos i boges per la Bioenginyeria 2019
Session: Internalization of Nanomotors by cancer and non-cancer cells
December 2017 | Prof. Samuel Sánchez | El Pais con tu Futuro
Keynote and speach corner. El País, Madrid
Top 10% downloaded papers: “Force Modulation and Adaptability of 3D‐Bioprinted Biological Actuators Based on Skeletal Muscle Tissue”
Advanced Materials Technologies (2019) 4, (2), 1800631
Find more information here
Awards
- Dr. Maria Guix | IBEC Symposium Award for the best flash presentation | 28.10.20
13th IBEC Symposium, Online Symposium - Dr. Maria Guix | Beatriu de Pinós Fellowship (Marie Curie COFUND Programme) | February 2020
- Xavier Arqué | 4th prize poster award | July 2019
International Workshop Microscale Motion and Light. Dresden, Germany - Rafael Mestre | 2nd prize talk award | July 2019
8th Living Machines Conference. Osaka, Japan - Dr. Maria Guix | Awarded BIST-IGNITE Collaborative Project with ICN2 | March 2019
Project: ElectroSensBioBots: Towards a new generation of programable 3D printed living biobots with nanoelectronics for sensing and local stimulation - Dr. Tania Patiño | Awarded BIST-IGNITE Collaborative Project with ICN2 | March 2019
Project: MOFtors: Enzyme-powered, metal-organic framework based motors - Prof. Samuel Sánchez | ERC Consolidator Grant 2019 by the Europen Research Council | 2019
- Jemish Parmar | Awarded Premi Pioner from CERCA | December 2018
Doctoral thesis: “Micromotors for Environmental Applications”. See more information here - Xavier Arqué | 1st prize poster award | October 2018
11th IBEC Annual Symposium. Barcelona, Spain - Rafael Mestre | 1st prize poster award | July 2018
7th Living Machines Conference. Paris, France - Xavier Arqué | IBEC International PhD Programme fellowship | June 2018
- Dr. Maria Guix | Juan de la Cierva Incorporación Fellowship | May 2018
- Prof. Samuel Sánchez | Best Poster Award at MRS Fall Meeting (Science Robotics,USA) | 2018
- Xavier Arqué | 1st prize talk award | December 2017
2nd Biomed PhD Day Symposium. Barcelona, Spain - Rafael Mestre | 1st prize poster award | November 2017
NanoBio&Med Conference. Barcelona, Spain - Prof. Samuel Sánchez | ERC Proof-of-Concept Grant “Lab-in-a-Patch”/ European Research Council | 2017
- Prof. Samuel Sánchez | Best Poster Award at Micro-Nanomachines International Conference (Wuhan, China) | 2017
- Prof. Samuel Sánchez | Guinness ® World Record for the smallest tubular jet of the world | 2017
- Prof. Samuel Sánchez | National Research Award Young Talent from Catalan Foundation for Research and Innovation | 2016
- Prof. Samuel Sánchez | Relevant Young Person for the Society by Círculo Ecuestre Barcelona (Spain) | 2016
- Prof. Samuel Sánchez | ERC Proof-of-Concept Grant “MICROCLEANERS” (European Research Council) | 2016
- Prof. Samuel Sánchez | TEDx Talk at Plaça del Fórum (Tarragona) |2016
- Prof. Samuel Sánchez | Innovator Under30 Europe/ Ambassador and representative at EU Parliament/EU Summit | 2015
- Prof. Samuel Sánchez | Princess of Girona Scientific Award (Princess of Girona Foundation/Spain) | 2015
- Prof. Samuel Sánchez | Selected Emerging Investigators Special Issue by Chem Communications Journal | 2015
- Prof. Samuel Sánchez | Future Leaders in Nano-architectonics at Sci.Tech.Adv.Mater. Journal | 2015
- Prof. Samuel Sánchez | Innovator of the year and Top 10 Spanish Innovator under 35/MIT Technology Review | 2014
- Prof. Samuel Sánchez | Full Fellowship for Nobel Laureate Meeting-Chemistry by VW Foundation (Germany) | 2013
- Prof. Samuel Sánchez | Best poster Award/1st Herrenhäuser conference “Downscaling Science” at VW Foundation (Germany) | 2013
- Prof. Samuel Sánchez | ERC Starting Grant 2012 by European Research Council | 2012
- Prof. Samuel Sánchez | IFW-IIN Research Prize as outstanding scientist/Leibniz Institute for Solid State and Materials Research Dresden (IFW)/Germany | 2011
- Prof. Samuel Sánchez | Guinness World Record ® for the «Smallest Man-Made Jet Engine» | 2010
Covers

Nano Letters
01/02/2019
Patiño, Tania, Porchetta, Alessandro, Jannasch, Anita, Lladó, Anna, Stumpp, Tom, Schäffer, Erik, Ricci, Francesco, Sánchez, Samuel, (2019). Self-sensing enzyme-powered micromotors equipped with pH-responsive DNA nanoswitches Nano Letters 19, (6), 3440-3447

Journal of the American Chemical Society
22/05/2018
Patiño, Tania, Feiner-Gracia, Natalia, Arqué, Xavier, Miguel-López, Albert, Jannasch, Anita, Stumpp, Tom, Schäffer, Erik, Albertazzi, Lorenzo, Sánchez, Samuel, (2018). Influence of enzyme quantity and distribution on the self-propulsion of non-Janus urease-powered micromotors Journal of the American Chemical Society 140, (25), 7896-7903

Applied Materials Today
16/01/2018
Romeo, Agostino, Moya, Ana, Leung, Tammy S., Gabriel, Gemma, Villa, Rosa, Sánchez, Samuel, (2018). Inkjet printed flexible non-enzymatic glucose sensor for tear fluid analysis Applied Materials Today 10, 133-141
 ACS Nano
ACS Nano
 ACS Nano
ACS Nano25/10/2016
Xing Ma, Ana C. Hortelão, Tania Patiño, and Samuel Sánchez (2016). Enzyme Catalysis To Power Micro/Nanomachines. ACS Nano, Volume 10, Issue 10, pp. 9053–9762
Advanced Materials Interfaces
 Advanced Materials Interfaces
Advanced Materials Interfaces21/01/2016
Morgan M. Stanton, Juliane Simmchen, Xing Ma, Albert Miguel-López, Samuel Sánchez* (2015). Bio-hybrid Janus Motors Driven by Escherichia coli. Adv Mat Interfaces
Small
 Small
Small09/10/2015
Xing Ma, Jaideep Katuri, Yongfei Zeng, Yanli Zhao and Samuel Sanchez (2015). Janus Micromotors: Surface Conductive Graphene-Wrapped Micromotors Exhibiting Enhanced Motion. Small, 11, 38, p4989